Electrical and Computer Engineering Design Handbook
An Introduction to Electrical and Computer Engineering and Product Design by Tufts ECE Students

Problem Identification in Engineering Design
Problem identification is the first step of the engineering problem solving method. The relevant themes, processes and techniques for electrical engineering and their application to the senior design project are presented here.
Theory and Background
Engineering is a profession of applied science. Engineers must creatively find new ways to solve problems, and are always real-world problems. As a result, they are usually more complex than most problems studied in school, since many of the assumptions that are made to illustrate a concept are no longer valid. Yet, engineers still must come up with some solution. With so many new factors to consider when forming a solution, the entire process may seem daunting. In this way, one of the most critical steps in the problem solving process is solid problem identification. By effectively identifying the exact problem, and engineer may limit his or her focus to only the factors required to solve that problem (Shaw, 2001).
When inexperienced students go about the problem solving process, there are several paths they might take. For example, suppose students are building some type of robot. They have wired all their circuits together, but upon testing the robot, it simply does not work. The worst path they could take in this problem solving situation is to place all the blame upon factors out of their control. “The wires we have are faulty, so there is nothing we can do.” While this might be the case, it should be the last resort, as it leads to giving up on all prior work.
More motivated students might check several parts of their design and tinker with it until it works. This ad-hoc method is most common. The students can recall different ideas they have heard might cause problems, and check each one sequentially until a solution is found. In this manner, the problem identification is melded directly to the solution, as finding the latter leads to discovering the former. The difficulty with this ad-hoc method is that it varies with each project, so a more general system to fix problems cannot be extracted from this.
The best students may look at generalized problem solving methods that have been studied and improved upon for decades, and find a way to apply it to their project. This is the path that we will examine, and to do so, we will look at several example methods.
Common Themes
The similarities among the problem solving methods can be seen across many industries, especially business. Even with no scientific or technical aspects to a situation, the same ideas identify the problems effectively. One main cause for the similarities is the desire in business and other fields to have a rigorous methodology aimed at improving the target idea, project, company, etc.
To look at some common themes in problem solving methods, we will compare four widely used techniques: the TRIZ method, Root Cause Failure Analysis, and the two methods described in How to Solve It by Pólya (1957).
TRIZ Method
TRIZ, which is a Russian acronym for Theory of Inventive Problem Solving , is a problem solving method based on the study of patterns in problems and solutions. The developers of this method have analyzed over three million inventions with the intent of predicting where breakthroughs will come from (Jugulum & Samuel, 2008). The idea is that problems and solutions are repeated across a wide variety of applications, so by generalizing the problem, one can find a proven solution. Once the abstracted problem has been solved, the solution must then be adapted to the specific situation.
This method, like many other problem solving methods, is an iterative process. Identifying the problem is the first step. Once all the TRIZ analysis tools have been used and a solution has been identified, the process cycles back to identification again. Any new factors that arise from the initial solution must be addressed and attacked in the same manner as the original situation.
The main tool of classical TRIZ analysis for problem definition is the contradiction matrix. The axes of the matrix are engineering parameters, and potential general solutions are filled in the boxes. When one solution leads to a larger problem, a contradiction is identified. Kutz describes the tool:
The objective of the matrix is to direct the problem-solving process to incorporate an idea that has been utilized before to solve an analogous ‘‘inventive’’ problem. The contradiction matrix accomplishes this by asking two simple questions: Which element of the system is in need of improvement? If improved, which element of the system is deteriorated?” (Kutz, 2006, p. 622)
This is a useful tool if the design process is certain to be a long and iterative one. By going through such exhaustive planning and searching in the beginning, one can cut down many iterations in the process. However, the tool falls short if the scope is problem. It simply may not be necessary to write out the entire matrix for a problem that has only a few clear parameters to it.
Root Cause Failure Analysis
In reliability engineering and quality control, the main objective is to deal with problems and failures. It seems clear that a systematic approach to identifying the problem would arise in this field. This is the aim of Root Cause Failure Analysis (RFCA) (Mobley, 1999). The main idea is to identify the root cause of the problem that arises and eliminate it, as opposed to waiting for effects and mitigating them. It is analogous to getting vaccinated for the flu instead of waiting to catch it and then buying tissues.
There are several analysis techniques used in RFCA. These include Failure Mode and Effects Analysis, Cause and Effect Analysis, also known as fishbone analysis, and Sequence of Events Analysis. The applicability of each technique depends on what type of problem is present and what you want to focus on. For example, when the problem arose over time, the sequence analysis might be best. Alternatively, when you just want to lay out all possible causes without giving weight to any, the fishbone analysis is useful. A diagram of fishbone analysis is shown in Figure 1.
Fishbone Analysis.
The main issue unique to RFCA is the high cost of performing such an analysis (Mobley,1999). This means it should be used only when it is absolutely necessary. Also, it is somewhat limited in scope, as it was originally designed for use in chemical plant analysis.
How to Solve It
The book How to Solve It , written in 1957 by mathematician George Pólya, gives the methods used to solve many math problems and abstracts them to general problems. He generally describes the steps as understanding the problem, making a plan, carrying it out, and analyzing.
One of the most useful ideas he puts forth that is widely used in mathematics is to find an analogous problem and solve it. This is more useful in the extremely abstract world of mathematics where assumptions always hold true and objects are perfect, but the technique can be used to get a good approximation of a real world problem. In the world of engineering, this may be sufficient to get the job done.
While the techniques outlined in the book are very interesting to me as a mathematician, there are times when the methods can fall short. It is good practice to see how rigorous problem identifications and solutions can be generalized, but that is the majority of what the method does. To go out and solve your specific problem, there are still many specific connections to be made.
Application to Senior Project
The problem identification process is critical to the senior design project’s success. Before any design, implementation, or even productive planning can be done, the central problems behind the project must be laid out. This process goes hand in hand with identifying customer specifications. It is always critical to know precisely what the customer wants; however, in the ECE senior design projects , where student have essentially no prior experience, this step should get special care. See Ulrich & Eppinger (2004) for more information on customer specifications.
Once the customer’s needs and desires have been finalized, the problem identification may begin. There will almost certainly be multiple areas of the project that have a main problem. As you look at all the items the customer has suggested or demanded, you may find contradicting qualities. Here is where breaking the problem down to its most basic form is crucial. Only then can engineering decisions be made about which areas to compromise for the good of the whole project.
While the customer specification process only should occur once, the problem identification occurs many times as the design process is iterated. For example, in the Red Team’s senior project , which involved modifying a Parrot AR Drone toy helicopter to be able to autonomously collect data, the first major problem was finding usable and inexpensive hardware to add (Video 1). Once that had been solved, the next problem area was designing software that would allow the drone to hover stably at a target. Initially these two problems appeared to be the largest challenges; however, upon completing preliminary testing, it was discovered that no matter how sophisticated the stabilizing algorithm became, the helicopter would not remain very stable. As a result, the problem solving branched out in a direction previously unexpected. The process of identifying this new problem led to a workable solution.
The Red Team’s autonomous drone project navigating and gathering data. Source: Tufts SPARTN Channel on YouTube.com.
Cited References
- Jugulum, R., & Samuel, P. (2008). Design for Lean Six Sigma – A Holistic Approach to Design and Innovation . Hoboken: John Wiley & Sons. OCLC WorldCat Permalink: http://www.worldcat.org/oclc/637224080
- Kutz, M. (2006). Mechanical Engineers’ Handbook – Materials and Mechanical Design (3rd ed.). Hoboken: John Wiley & Sons. OCLC WorldCat Permalink: http://www.worldcat.org/oclc/59003354
- Mobley, R.K. (1999). Root Cause Failure Analysis . Boston: Newnes/Elsevier. OCLC WorldCat Permalink: http://www.worldcat.org/oclc/40255833
- Pólya, G. (1957). How to Solve It . Garden City, NY: Doubleday. OCLC WorldCat Permalink: http://www.worldcat.org/oclc/523312
- Shaw, M. C. (2001). Engineering Problem Solving – A Classical Perspective . Norwich: William Andrew Publishing/Noyes. OCLC WorldCat Permalink: http://www.worldcat.org/oclc/633151037
Additional Sources / Recommended Reading
- Ulrich, K. T. & Eppinger, S. D. (2004). Product Design and Development . Boston/New York: McGraw-Hill/ Irwin. OCLC WorldCat Permalink: http://www.worldcat.org/oclc/122424997
- ← Fuzzy Front-End
- Intellectual Property →
Disclaimer | Non-Discrimination | Privacy | Terms for Creating and Maintaining Sites

- Oct 13, 2019
10 Steps to Problem Solving for Engineers
Updated: Dec 6, 2020
With the official launch of the engineering book 10+1 Steps to Problem Solving: An Engineer's Guide it may be interesting to know that formalization of the concept began in episode 2 of the Engineering IRL Podcast back in July 2018.
As noted in the book remnants of the steps had existed throughout my career and in this episode I actually recorded the episode off the top of my head.
My goal was to help engineers build a practical approach to problem solving.
Have a listen.
Who can advise on the best approach to problem solving other than the professional problem solvers - Yes. I'm talking about being an Engineer.
There are 2 main trains of thought with Engineering work for non-engineers and that's trying to change the world with leading edge tech and innovations, or plain old boring math nerd type things.
Whilst, somewhat the case what this means is most content I read around Tech and Engineering are either super technical and (excruciatingly) detailed. OR really riff raff at the high level reveling at the possibilities of changing the world as we know it. And so what we end up with is a base (engineer only details) and the topping (media innovation coverage) but what about the meat? The contents?
There's a lot of beauty and interesting things there too. And what's the centrepiece? The common ground between all engineers? Problem solving.
The number one thing an Engineer does is problem solving. Now you may say, "hey, that's the same as my profession" - well this would be true for virtually every single profession on earth. This is not saying there isn't problem solving required in other professions. Some problems require very basic problem solving techniques such is used in every day life, but sometimes problems get more complicated, maybe they involve other parties, maybe its a specific quirk of the system in a specific scenario. One thing you learn in engineering is that not all problems are equal. These are
The stages of problem solving like a pro:
Is the problem identified (no, really, are you actually asking the right question?)
Have you applied related troubleshooting step to above problem?
Have you applied basic troubleshooting steps (i.e. check if its plugged in, turned it on and off again, checked your basics)
Tried step 2 again? (Desperation seeps in, but check your bases)
Asked a colleague or someone else that may have dealt with your problem? (50/50 at this point)
Asked DR. Google (This is still ok)
Deployed RTFM protocol (Read the F***ing Manual - Engineers are notorious for not doing this)
Repeated tests, changing slight things, checking relation to time, or number of people, or location or environment (we are getting DEEP now)
Go to the bottom level, in networking this is packet sniffers to inspect packets, in systems this is taking systems apart and testing in isolation, in software this is checking if 1 equals 1, you are trying to prove basic human facts that everyone knows. If 1 is not equal to 1, you're in deep trouble.At this point you are at rebuild from scratch, re install, start again as your answer (extremely expensive, very rare)
And there you have it! Those are your levels of problem solving. As you go through each step, the more expensive the problem is. -- BUT WAIT. I picked something up along the way and this is where I typically thrive. Somewhere between problem solving step 8 and 10.

The secret step
My recommendation at this point is to try tests that are seemingly unrelated to anything to do with the problem at all.Pull a random cable, test with a random system off/on, try it at a specific time of the day, try it specifically after restarting or replugging something in. Now, not completely random but within some sort of scope. These test are the ones that when someone is having a problem when you suggest they say "that shouldn't fix the problem, that shouldn't be related" and they are absolutely correct.But here's the thing -- at this stage they have already tried everything that SHOULD fix the problem. Now it's time for the hail mary's, the long shots, the clutching at straws. This method works wonders for many reasons. 1. You really are trying to try "anything" at this point.
2. Most of the time we may think we have problem solving step number 1 covered, but we really don't.
3. Triggering correlations.
This is important.
Triggering correlations
In a later post I will cover correlation vs causation, but for now understand that sometimes all you want to do is throw in new inputs to the system or problem you are solving in order to get clues or re identify problems or give new ways to approach earlier problem solving steps. There you have it. Problem solve like a ninja. Approach that extremely experienced and smart person what their problem and as they describe all the things they've tried, throw in a random thing they haven't tried. And when they say, well that shouldn't fix it, you ask them, well if you've exhausted everything that should have worked, this is the time to try things that shouldn't. Either they will think of more tests they haven't considered so as to avoid doing your preposterous idea OR they try it and get a new clue to their problem. Heck, at worst they confirm that they do know SOMETHING about the system.
Go out and problem solve ! As always, thanks for reading and good luck with all of your side hustles.
If you prefer to listen to learn we got you covered with the Engineering IRL show!
For Youtube please go to:
https://youtu.be/EHaRNZhqmHA
For Spotify please go to:
https://open.spotify.com/show/3UZPfOvNwQkaCA1jLIOxp4
And don't forget to subscribe if you get any value from the Engineering IRL Content
- Technical Tactics
- 10+1 Steps to Problem Solving
Recent Posts
How to Implement OSHA’s Requirement of Emergency Medical Services in Construction
Preventing Noise-Induced Issues in Construction
The Advantages of CAD for Modern Engineers
Get your free Engineering Toolkit for Engineering IRL listeners only

Get a copy of the Operational Technology Ultimate Guide for Engineers e-book for free.
Kaleidoscope: Educator Voices and Perspectives
- About Kaleidoscope
- Current Issue
- Past Issues
Four Phases of the Engineering Design Process in Math and Science Classrooms
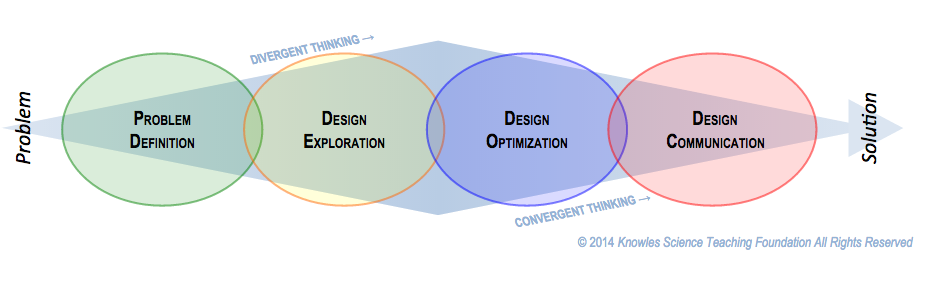
Through a rich and often boisterous discussion, four teachers collectively broke down the engineering design process into four main phases: problem definition, design exploration, design optimization, and design communication.
INTRODUCTION
The KSTF Engineering Task Force¹ (ETF) has been examining how to integrate engineering projects and processes into math and science classrooms. It draws on Teaching and Senior Fellows’ classroom experience. The Senior Fellows that make up the ETF are life science teachers, physical science teachers, math teachers, and even engineering teachers. Some of us are novices whose boundless enthusiasm makes up for our lack of engineering experience; others bring expertise based upon engineering degrees and years of experience in the field.
At the initial meeting of the ETF in summer 2013, we considered the initial question: “What is important in engineering design?” Through a rich and often boisterous discussion, we collectively broke down the engineering design process into four main phases: problem definition, design exploration, design optimization, and design communication.
The ETF’s first three phases align well with the three-phase process outlined in the Next Generation Science Standards (NGSS), with an additional phase to emphasize design communication. We have chosen to represent each phase with a circle instead of an arrow because the engineering process is iterative, not linear. Imagine that each circle is a gear that helps turn all of the others in an effort to complete the whole process. In the first two phases, the engineering process is divergent, where the engineer/student is expanding the design space through brainstorming and creativity. The latter two phases focus on narrowing down the choices, converging to a single, optimized solution.
Each phase offers different rewards and challenges for students, teachers, and engineers, and each phase is critical within the larger process of moving from problem to solution. In the article below, four members of the ETF have each selected one phase, crafting an argument for why we feel that phase is so critical to the engineering design process. We hope that this article will help you understand the engineering design process, provide an impetus for you to incorporate engineering into your classroom, and consider which phase you think is most crucial to the process.
ENGINEERING DESIGN PROCESS DEVELOPED BY KSTF ENGINEERING TASK FORCE
PHASE 1: PROBLEM DEFINITION BY CASEY O’HARA
It is often said that a scientist is not one who gives the right answers, but instead asks the right questions. It might as easily be said that an engineer is one who identifies the right problems. A vague notion of a problem, expertly framed, becomes a worthwhile engineering task. Clever framing can focus attention on one aspect of a grand issue, or can “embiggen” an otherwise trivial problem. In establishing the scope, constraints, and criteria of an engineering problem, problem definition becomes the single most influential phase in the design process.
Let’s examine a broad, challenging problem: cooking practices in rural communities in developing countries are often terribly inefficient in fuel use, create dangerous indoor air pollution, and contribute to carbon emissions. For this example, I will put myself into the shoes of a student, given only the broad problem statement above as my guidance. First, let’s narrow the scope to focus only on cooking practices in rural Kenya. I could have selected a different country, with different practices and needs, or defined an inclusive scope that addresses concerns across many contexts; different choices in scope would likely result in different products at the end of the process.
Let’s establish some constraints, consistent with the chosen scope. With a little research I found that rural Kenyans rely almost exclusively on wood as cooking fuel; I will constrain my design to use wood as fuel, to accommodate existing cultural norms. I might set constraints in price and materials, ensuring that my design is affordable for the average Kenyan family. Again, I could choose different constraints, understanding that this would certainly impact the final design.
It is often said that a scientist is not one who gives the right answers, but instead asks the right questions. It might as easily be said that an engineer is one who identifies the right problems.
Finally, I must determine criteria by which I would evaluate my design. I would like to increase fuel efficiency, reducing both fuel costs and carbon emissions. I would also like to improve indoor air quality and minimize cost. How I choose to prioritize these criteria drives choices involving tradeoffs. For example, adding a chimney to vent exhaust gases might greatly improve indoor air quality, with less improvement to the stove’s cooking efficiency, and likely at a higher price. Which design is preferable? It depends entirely on my priorities established in this phase.
The final outcome of any engineering design project depends on choices made in each phase of the process. But this initial phase—problem definition— establishes the framework within which all other engineering decisions must be made and evaluated. And this extends far beyond engineering—as students develop skills in critically examining problems and defending rational decisions about priorities, they develop a conceptual toolbox to approach problems in any science or math class, as in life.
As teachers, it can be a little daunting to relax our grip on our curriculum, to give our students the freedom to push the bounds of an in-class project perhaps beyond our own comfort levels. But the student engagement and empowerment that results is certainly worth the effort. We want our students to ask the right questions and to identify the right problems—that’s where the engineering starts.
PHASE 2: DESIGN EXPLORATION BY KATHERINE SHIREY

Students work on a newspaper support structure challenge to learn about the four phases of engineering. (Photo by Katey Shirey)
The second phase of the engineering design cycle is the most important in high school engineering: design exploration. It is here that the studentengineer develops a potential solution and where the direction of the classroom is steered away from the teacher and towards the student. In phase two a student-engineer takes a problem statement with constraints and begins to make her investigation into what would best solve the problem. She generates and compares design alternatives through systematic modeling, testing and comparison. At the end of phase two she has a preliminary design that approaches or meets the list of required functions, criteria and constraints from phase one.
Significantly, phase two allows solutions to diverge widely and encompass student interests and curiosities without restriction. It reorients the classroom away from teacher-directed instruction and sends students into a hunt for the best solution. In this way the design exploration phase is the most open-ended and student-centered portion of the engineering design process. Phase two represents a significant divergence from typical models of science instruction where instruction starts with a teacher sharing information with students through lecture, and then students familiarizing themselves with the information by conducting a lab or solving sample problems before being graded on their retention.
In design exploration, however, a student-engineer is encouraged to brainstorm a flurry of design ideas, gather data multiple times on any number of questions that will help to evaluate the ideas, and use other tools, such as a Pugh Chart or decision matrix, to evaluate the designs. There is no predetermined answer to be verified, only limitless imagination to be explored and compared. As they test ideas, students will investigate physical and mathematical constraints—the subject content that a teacher may wish them to “cover” in a more traditional lab.
Last summer I asked 26 high school students at a science and math enrichment summer camp to design a doghouse that would stay warm in the winter and cool in the summer. Students brainstormed, debated, and defended their ideas for the best materials: shingles, wood, foam, aluminum foil, carpet, plastic sheeting, mirrors, tubes, vent panels, solar panels, fans, ice and more. In small groups, students built mock-ups to compare various ideas before deciding on the most important, appealing, and successful designs to carry forward into the next phase. One group decided to pursue a balloon cooling mechanism to blow air into the house; another group proposed a vaulted, open-air second story for the dog to retreat to on hot days.
Without limits or bounds for design, the students worked with deep complexity and interest, all the while developing a better understanding of science content. For instance, they learned how a “biology word” like homeostasis relates to insulation, heat transfer, homes, and energy.
In summary, the design exploration phase of engineering design shifts the purpose of classroom activities away from that of teacher demand and approval, and toward student interest and student evaluation, increasing the intrinsic motivation that students have towards their work.
PHASE 3: DESIGN OPTIMIZATION BY SCOTT MURPHY
Humans have been trying to solve problems since the inception of human existence. Common sentence starters include, “I wish that …” or “Hey, I’ve got a great idea…” The first allows people to identify a problem or a need; the second allows people to explore a design. However, the science of engineering reaches a crucial maximum when we start optimizing our design.
For instance, travel across a long distance has improved tremendously, allowing people to meet, share ideas, and explore new terrain. Think about the automobile; the structure of the car remains largely the same as Henry Ford’s Model T. However, that has not stopped car manufacturers from employing legions of engineers. The problem remains defined (how do we get from Point A to Point B?) and the essential design is very similar. That leaves the process of optimizing the design, given changing priorities.
Companies establish their criteria and priorities in the first phase of the process. They want cars to be affordable, meet certain mileage standards, and be fun to drive. The car must be comfortable; the car must be safe; the list continues. However, until a prototype is actually built, this wish list is simply that—a wish! Engineers are continually collecting data and using that data to make informed decisions about what solutions will yield the best end product. In the classroom, this might look like students building a gravity car based on a set of constraints (e.g., needs to travel a certain distance, stop, complete the trip intact), making a high level engineering project accessible for all students.
After the criteria and constraints are established, the metaphorical rubber of engineering practices meets the road of reality. Everyone would love to build a cheap car that is safe, fuel efficient, and fun to drive. When others would use their gut instinct and hope for the best, the engineer uses data to make decisions. Each time new data becomes available, the engineer returns to the design to improve it. As science continues to discover new ideas and possibilities, the engineers continue to reevaluate their decisions to create the best possible solution. This iterative process separates engineering from other approaches, allowing for the best possible outcome given a set of circumstances. This is an opportunity for students to engage in authentic science dialogue in the classroom. As students collect data on individual variables, they will need to share their information with their classmates in order to determine the most effective design.
Once a decision has been made, it is time to build and test the concept. Without an actual prototype to test, all of the work is theoretical. This stage is where the engineer confirms the viability of the solution. Often there is a good deal of fine tuning that needs to take place after the construction of the prototype that was not anticipated in the earlier stages. For example, musical instruments are constructed with tuning capabilities to account for small deviations that occur in the physical reality, but not in the abstract theory.
I use this process in my classroom when I give my students the task of constructing their own musical instruments. As students learn about sound and waves, these physical concepts are quite abstract and difficult for them to internalize. By affording students the opportunity to hear the different notes based on changing the design characteristics, constructing a prototype allows students to see how engineering is a relevant skill that they can apply outside the classroom.
This kinesthetic learning helps make science, math, and engineering accessible to students with many different learning styles as they get to actually see their ideas come to fruition. Without the third phase in the engineering cycle, engineers would simply be the philosophers of the science world.
PHASE 4: DESIGN COMMUNICATION BY KELSEY JOHNSON
The fourth phase of the engineering design process provides the most leverage for engineering’s power and utility. Communication is the alpha and omega of engineering; it provides both the invitation and the legacy. Rather than terminating a linear process, communication acts as a revolving door from one design cycle to the next. Our collective body of knowledge, our human inheritance, has grown since people first identified problems or designed and optimized solutions.
The design exploration phase of engineering design shifts the purpose of classroom activities away from that of teacher demand and approval, and toward student interest and student evaluation, increasing the intrinsic motivation that students have towards their work.
Poet Charles Bukowski writes, “genius might be the ability to say a profound thing in a simple way.” Similarly, communication in engineering is not about rhetoric, popular oratory, or winning more followers. Instead, it’s about sharing information so that people, possibly distant in space and time, can use that information to advance the wheel rather than reinvent it. Effective technical communication requires concise, compelling argumentation. Digital media now enable students to engage in this human conversation with unprecedented access and voice. Students showcase their achievements and learn from one another when schools prioritize design communication. For example, schools like the New Tech Network and High Tech High integrate design communication into their academic calendar by utilizing student exhibitions as both a deadline for student accountability and airtime for student voice and growth. A light of motivation ignites in students when they hear calls to solve real engineering problems and have enough scaffolding to engage in all four phases of the engineering design process. Similarly, national calls by organizations like the BentProp Project, First Robotics, and Progressive Automotive X Prize invite high school students to participate in solving real-world problems and to communicate their designs in authentic, inspiring competitions.
Access to information and physical resources are arguably the rate-limiting steps in solving technological problems. As technology enhances the speed that resources can travel over great distances, it also improves the speed with which information can be shared. Communicating evidence-based, logical arguments about what makes a design optimum, what’s been tested and rejected and why, students, scientists and engineers add to our legacy of knowledge at a groundbreaking rate. As our world gets flatter, the fourth stage of the engineering design process provides the guiding light to a better future.
Members of the KSTF ETF consider engineering a vehicle to engage students through creative, authentic problem solving. In presenting each phase of the design process separately, our aim was to create an evidence-based argument for the value of the engineering design process as a whole. We hope that this article has helped clarify the different phases of the engineering design cycle and why each is important for our students.
The ETF’s vision is that all students will get to experience a comprehensive engineering design project in their science or math class, from problem definition through design communication, and that every teacher will have the confidence and resources to provide this opportunity for their students. But we recognize that it might be overwhelming to involve all four cycles of the design process during your first attempt at employing an engineering project in your classroom. It is often easier, for both teachers and students, to start with a lesson that teaches one or two design phases before working up to a full-blown engineering project. We encourage you to start small and modify a pre-existing lesson and experiment to see what happens.
FOR MORE INFORMATION
If you are interested in more information please reach out to any of the authors or Dina Portnoy, KSTF’s Director, Senior Fellows Program (dina. [email protected]). Additionally, more information on how to incorporate engineering in the classroom can be found at the KSTF ETF Resource Center: http://ow.ly/KysPJ . We are very interested in supporting and/or collaborating with other teachers who would like to incorporate engineering into their classrooms. Happy building, happy designing, happy learning!
¹The Knowles Science Teaching Foundation (now the Knowles Teacher Initiative) Engineering Task Force operated from 2012–2016. Since 2017, engineering courses and services have been offered through the Knowles Academy. Visit www.knowlesteachers.org/knowles-academy to learn more.
Download Article
Kelsey Johnson Rasmussen is a Knowles Senior Fellow who teaches computer science and engineering at Erie High School in Erie, Colo. Previously, she taught science in the Philadelphia School District for five years, including the founding year of a project-based school that used engineering design as part of its curriculum. Kelsey was a member of the KSTF Engineering Task Force and the Planning Committee for KSTF Project ASCENT (Achieving STEM Course Effectiveness Through Networked Teachers). Kelsey can be reached at [email protected] .
Katherine Shirey is a Knowles Senior Fellow. She works at the Knowles Teacher Initiative as a Knowles Academy Program Officer. For five years, she taught physics at Washington-Lee High School in Arlington, Va. During that time, she participated as a teacher liaison to the IceCube Neutrino Observatory at the South Pole. In 2017, she earned a Ph.D. in science education from the University of Maryland. Her current research interests are related to the ways that creativity relates to learning in physics instruction. She was a member of the KSTF Engineering Task Force. Katey can be reached at [email protected] .
Scott Murphy is a Knowles Senior Fellow who teaches physics and engineering at St. Joseph’s Preparatory School in Philadelphia, Penn. After starting to use engineering design in his classroom, he proposed that his school have a special engineering class that he designed and is teaching for the fourth time during the 2018–2019 school year. He was a member of the KSTF Engineering Task Force and is the Academy Coordinator for the Knowles Coaching Network. Scott can be reached at scott. [email protected] .
Casey O’Hara is a Knowles Senior Fellow. For eight years, he taught physics, integrated science, and engineering & green technology at Carlmont High School in Belmont, Calif. In 2014, he completed a Master of Environmental Science and Management at University of California, Santa Barbara’s Bren School and an American Association for the Advancement of Science (AAAS) Mass Media Science & Engineering Fellowship at The Oregonian, in Portland, Ore. Currently, he is pursuing a Ph.D. researching the role of social and economic equity in marine conservation. Casey was a member of the KSTF Engineering Task Force. Casey can be reached at [email protected] .

- Engineering Design Process
References and Citation
High Tech High: http://ow.ly/KyFMW
New Tech Network: http://ow.ly/KyFOI
Johnson, K., Murphy, S., O’Hara, C., & Shirey, K. (2015). Four phases of the engineering design process in math and science classrooms. Kaleidoscope: Educator Voices and Perspectives , 1 (2), pages 19-24.
Kaleidoscope Comments?
- Your Name First Last
- Your Email *
What's On Your Mind
- Questions, Comments, or Thoughts
- I consent to my submitted data being collected and stored
- Phone This field is for validation purposes and should be left unchanged.
In This Issue
Engineering: The nature of problems
Introduction
The optimistic approach to a problem is to view it as a challenge and an opportunity – a chance to make progress. In this course, the nature of problems is explored by looking at the way they are used as a stimulus for finding solutions. It is presumed from the start that you want to be involved in the process of finding solutions and that you are not expecting simply to be given the answers.
One example that is investigated in this course concerns how to devise lighter bicycle frames, and the way to assess the merits of alternative materials from which to make them. There is no single way to move from a problem like this to possible solutions. In fact there are often several ways to set about finding several solutions, but there are a few general factors that are important to the search.
First it is important to appreciate the needs from which a problem arises. For the bicycle frame it's not just a lighter material that is required, but rather it is one that can be deployed to bear specific loads imposed on a fully functional frame.
Next it is valuable to understand the challenge well enough to be able to specify the nature of solutions, perhaps using the formal languages of engineering, mathematics, science and problem solving. For example, it is unwise to take part in a discussion on 'the best materials for bike frames' without a technical appreciation of both the job a frame has to do and the relevant attributes of the candidate materials. Establishing what you don't yet know usually starts by recognising how effectively you can tell someone else where the challenges arise. You must be able to communicate with a wide range of people, sometimes 'calling a spade a spade', and at other times describing precisely what the word 'spade' actually means.
In passing from a problem towards possible solutions it is essential to be able to evaluate and quantify the technical aspects. Another general factor in the search for solutions is the use of algebra and numbers to compare options and to inform choices. Some calculations are simple evaluations that can be done directly with or without an electronic calculator. Others need a line or two of algebraic analysis. Yet others are too tedious or too complicated to tackle without a computer-based approach using spreadsheets or more sophisticated software.
In the end, the best motivation for learning comes from simply requiring the knowledge in order to make progress.
This OpenLearn course provides a sample of level 2 study in Engineering .
Learning outcomes
After studying this course, you should be able to:
view solutions as belonging to particular categories, broadly classified as: innovation by context; innovation by practice; routine
see how external factors affect engineering projects, and appreciate the range of engineering involved in meeting the basic needs of our society
recognise and apply a range of problem-solving techniques from each stage of the engineering design cycle, to include the following: physical modelling; mathematical modelling; iteration; use of reference data; refining an engineering specification
identify when models are likely to be useful and when they are no longer valid
recognise and distinguish between the following technical terms: differential equation; simultaneous equation; boundary condition; constraint; finite element analysis (FEA); mathematical model; physical model; prototype; demonstrator; anthropometric; ergonomic; product specification; functional specification.
1 Problems and innovation
1.1 solving problems.
It could be said that our species is defined by its irresistible urge to solve problems – it's what makes us human. Strange, then, that the word 'problem' has such negative overtones. I think that the root of this paradox is that the word is used both when we identify a need – the first link in the problem-solving chain – and when we undertake the process of meeting that need. It is the identification of the need and the realisation that it is real and must be met that creates the anxiety and the negative feelings ('Houston, we have a problem …'). The process of finding a solution is the exhilarating part that makes us thirst for more.
I think of my love of skiing. Sometimes I get to the top of a mountain and look down at the precipitous slope I must now descend to get back to safety and a good hot meal, and I am gripped by fear, perhaps even to the extent of wondering whether I'll survive this time. What provides the pleasure, apart from the thrill of speed, is using my skill (such as it is) to meet my need to be safe again.
'The Engineer: Skier on the Technological Piste' is perhaps too bizarre a title for a course, so welcome instead to T207_1 The engineer as a problem-solver: the nature of problems .
T207_1 is taken from an Open University course entitled ' The Engineer as Problem Solver '. The fact that we have prepared a course with this title shows that we think there is something useful to say about the process of solving engineering problems. It seems to imply that there is a technique to be learned – a preferred method. To a degree, this is true; experience has taught us that there are certain ways of proceeding which tend to lead to better solutions than others. This course is designed to give you a flovour of the skills and knowledge that will help you to make active and informed decisions when tackling your own engineering problems.
In engineering, solutions to problems come in three categories:
innovation by context;
innovation by development;
This is going to need some explanation, so here goes.
The categories differ from one another in the extent to which the solution is a step into the unknown, and this is why it may be chosen before the solution itself is known.
| Old technology | New technology | |
|---|---|---|
| New context | innovation | invention |
| Old context | routine solution | innovation |
As you can see, there are four sectors in the table, defined by the technological newness of the solution, and the newness of the context in which it is to be applied.
The 'customer' for the solution will often have a very definite idea of the sector in which they wish the engineer to operate. For example, a new heart pacemaker will be heavily constrained in many respects: only certain materials will have been approved for the casing, as they have to be biocompatible; certain safety features must be included, such as methods of making sure the casing is hermetically sealed, making the device immune to electromagnetic interference, limiting the power and frequency of the heart stimulation; as well as other limits such as on the minimum lifetime of the battery and the need to provide sufficient warning of its decline to allow it to be replaced in time. The list is much longer than this. The effect is to discourage excessive innovation (by which I mean a significant change to the way something is made or the way it works – or a new type of thing entirely) and the chances are that an innovation by development will be the order of the day.
We define innovation by development as changing the bit that doesn't work, or that could work better, to improve the function of the whole product or design for reasons of cost, performance, ease of manufacture or gaining competitive edge.
This tight constraining of innovation does not preclude entirely the invention of a new type of pacemaker, but it is unlikely that a manufacturer will be asking its engineers to throw away the rule book and dream up something new. If an innovative pacemaker is to appear, it will be because someone has had a sudden inspiration, and the idea is so very good and the potential benefits so great that a manufacturer is prepared to take a large risk and go through years of testing to gain safety approval.
It is usually where safety is a critical factor that we find a tendency to reduce the amount of innovation, so it would be equally easy to find an example from the oil industry, or from the aerospace or military fields. Very conservative purchasers are the other main reason for holding back on innovation. Perhaps surprisingly, the industrial process control market is one such area. Engineers responsible for the design and installation of processing plant usually take a lot of persuading that a new type of flowmeter, say, will be better than the one they know and have been using for many years.
At the other extreme, there are just as many examples where innovation is essential to the success of a project. There's even a well-known mail-order catalogue whose very name includes the word. The market for gadgets and gizmos is huge, and rather prone to the vagaries of fashion. These two characteristics make it a powerful driver for innovation. Last year's temperature-indicating tea cosy with built-in radio, flashlight and satellite navigation system may have sold a million, but it's a little passé now ( Figure 1 ).

Another important instance where we know in advance that an innovation is required is where the existing technology is very mature, and has been incrementally developed as far as it is possible to take it, yet we have identified a need to improve the performance of the product still further. In this case, we can clearly see that innovation will be the only way to get there. An example of this is the bubble-jet printer. In the late 1970s and early 1980s, the vast consumer and small-business market for printers could not stand the cost of laser printers, yet was demanding better quality, less noise and higher speed from the alternative, which was the dot-matrix printer. This works by transferring ink from a typewriter ribbon onto the paper, using an array of electromagnetically actuated pins. These had been improved over many years, and were about as good as they could get. They had reached the limits of how fine a pitch they could be arranged on at a reasonable price but, even so, they were still rather slow and noisy.
What was required was an innovation, and this came in the form of the bubble-jet, which was an entirely new technology based on the ability to etch arrays of very fine holes in a polymer substrate using photolithography. The ink is transferred to the paper by creating pressure pulses behind the appropriate hole, using electrical heating. A single drop of ink is then ejected at high speed and strikes the paper. At a stroke, the new technology provided marked improvements on speed, pitch and noise level, and all without increasing the cost of the product.
1.2 Innovation by context
The word 'innovate' simply means 'make new'. We have chosen in this course to narrow the meaning of this term to be more or less synonymous with 'invention'. I would argue that innovation by context is as much a process as a result. By that, I'm using the term to mean something more like 'creativity'; and it's creativity that lies at the heart of all engineering. More than anything else in our professional lives, we engineers are excited by the prospect of being responsible for the creation of something better than we had before. This does not mean that all engineers are inventors in the sense that the word is normally understood (i.e. taking out patents on some new gadget). Innovation by context is the fruit of the creative process going on in the mind of the engineer when solving a problem, and can be anything from a clever change in the design of a computer program that allows it to run faster or use less memory, to something revolutionary like the jet engine.
For an engineer, creativity is a daily activity. Sometimes, the result is a big enough innovation to call an invention, and to patent, but mostly it's just small but necessary steps in reaching the goal. You can be creative even if your solution is of the type we classify as routine, as we'll show later. There are numerous great examples of innovative solutions, some of which are inventions. How about the first aqueduct, canal, drain, concrete, pilotless aircraft, the building of the Eden Project in Cornwall, the new roof over the British Museum, radar (mapping the skies, speed cameras and predicting weather), the first mobile phone, waterproof fabric, the microwave oven, the compact disk, Dyson's bag-less vacuum cleaner? … the list goes on. It's difficult to pick one example for looking at in more depth, but one of the best and most simple examples of innovation by context has been the transformation of radio into a self-sufficient technology, described in Box 1 .
Box 1 Innovation by context – an example
In 1991, inventor Trevor Baylis saw a television programme about AIDS workers in Africa. In poor countries radio broadcasting had always played a part in health education, but in this programme the workers were explaining how batteries were expensive or unavailable and electricity supplies unreliable or simply non-existent. The programme provided Baylis with a problem, and inspired him to find an innovative solution.
Baylis's invention, as you have probably guessed, was the clockwork radio, Figure 2 . He wasn't the first person to use springs to generate electricity, but prior to his design the energy had only ever been produced this way for short bursts at a time – here is the context . The innovation is in applying springs to the provision of low-power electricity for consumer electronics. Baylis invented a mechanism that gave forty minutes of play from just twenty seconds of winding. The winding action coils a spring, attached to a gearbox, which is connected to a dynamo. When the spring is released the gearbox controls the steady discharge of energy to produce electricity, and the radio works. The dynamo provides three volts at between 55 and 60 milliwatts, but the design also incorporates a solar-powered source to extend its performance.

Thus power is generated from human input, backed up by free and widely available solar power. Baylis realised that his new technology had huge potential. However, this was only half the task: he also needed to reduce the amount of power consumed by the radio, and this is where the less glamorous and less visible (but at least as important) part of the innovation was done. A team of electrical engineers worked to make improvements in small increments until the power consumption was pared down enough to allow the radio to work for a reasonable amount of time between rewindings of the spring.
Reaction to the radio was initially somewhat sceptical but eventually, in 1994, a prime-time BBC TV programme ( Tomorrow's World ) agreed to feature the idea. Two entrepreneurs who happened to be watching contacted Baylis immediately, going on to form a company with the intention of putting the clockwork radio into production. 'Freeplay', as they were called, raised a government grant for initial development costs and then found investors, to date selling over three million units. The company has the endorsement of heads of state, international aid organisations, royalty, celebrities, the European Union, the United Nations and more, and has gone on to develop other similar products.
The original problem – that of providing a self-sufficient technology so that radios could be widely available in developing countries – has been solved not only in theory but also in practice, the true test of an innovation.
1.3 Innovation by development
Innovation by development is about changing the bit that doesn't work, or that could work better, to improve the function of the whole for reasons of cost, performance, ease of manufacture or competitive edge. You probably noticed in Box 1 'Innovation by context – an example' that Baylis had to incorporate a number of developmental innovations as well. Improvements in materials or production equipment or techniques can present solutions to manufacturing difficulties, and so development becomes incremental not only in a product, but in a chain of production.
It's where the big money lies for companies wanting to keep one step ahead of their competitors without the (in general) higher risks and longer timescales of innovation – 'our powder washes brighter', 'this battery lasts longer' or 'this car is quieter to drive'.
Most technological items in everyday use have been subject to innovation by development. You can see the results in the motor industry, in aeroplanes, trains, mobile phones, computers, fridges, cookers, plastics, household implements … it's more difficult to think of something that hasn't been subject to innovation by development! Box 2 Innovation by development – an example explores a typical product development.
Box 2 Innovation by development – an example
The Black & Decker Workmate portable workbench ( Figure 3 ) has been the DIY and professional craftsman's best friend for thirty years now. At first sight, it is a product that has not changed much at all in that time; but if you look more closely, you will see that it has undergone a considerable amount of innovation by development. However, this has been done over such a long period of time that you need to put the original next to a new one to spot the differences. We can look at some of these changes and try to guess why they were made.

The original Workmate had a pair of long leadscrews ( Figure 4a ), one on each side, to move the jaws of the vice-cum-work surface. The length of these screws was over 30 cm, and they moved the half of the table furthest from the user relative to the other half, which was static. This enabled the bench to offer one of its best selling points: the ability of the vice to accept a large range of workpieces, including wedge-shaped and very wide ones.

The current design has switched things around, so that it is now the part of the top nearest the user that moves, but the leadscrews are very much shorter and therefore lighter ( Figure 4b ). This would normally restrict the range of widths of workpiece that can be accepted, but this has been restored by making the other part of the top removable. To accept pieces with a width that is outside the range of the leadscrews, this part of the top is simply unlocked from the framework and moved into one of the alternative locations for it, providing a new range of jaw separations that overlap slightly with the previous position.
Make a list of the effects of the change to the design of the Workmate's vice mechanism, noting the beneficial and detrimental effects for each one from the manufacturer's and the user's point of view.
Why do you think this change has been introduced?
Cost saving on leadscrews:
better margin for manufacturer, lower price for user.
Reduction in weight:
reduced distribution cost for manufacturer, easier to carry for user.
Screw does not now pass under the opening of the vice:
no direct effect for manufacturer, reduced likelihood of clogging with sawing debris (and therefore excessive friction) for user.
Extra operation of removing and replacing the moving jaw required for changes in workpiece width that exceed the leadscrew travel:
no direct effect for manufacturer, less convenient for user for small changes in workpiece width that nevertheless require relocation of the moving jaw, though quicker to change jaw separation for large changes in workpiece width.
The effects on both the user and manufacturer of all but the first change are slight. Therefore, the likely reason for the change is the first one – cost saving. This is partly offset by a cost to the manufacturer in making the change – the cost of the design work, changes to drawings, parts lists and order schedules. Note that the cost reduction has a beneficial effect for both the user and the manufacturer.
1.4 Routine solutions
This is the last of our three categories, and possibly the most difficult to define because the approach is not as definite. Routine solutions involve configuration or reconfiguration of existing devices or components, without innovation, because something is broken or needs to be repositioned, or there is simply a better way to do it. If you change the locks in your house or car, you are reconfiguring them; if you tune the car, calibrate the central heating, set the coordinates for your satellite navigation system, change from an overhead lamp to a wall light, or even just change station on your television, you are applying a routine solution to a problem by reconfiguring the bits. As I write, I'm reminded of the ongoing attempt by a group of stalwarts to reconfigure the standard keyboard, originally designed to prevent the letter levers clashing on a manual typewriter, into something more user-friendly for today's computer user.
The biggest examples of challenges requiring routine solutions are, literally, physically big. Things that need configuring are often remote, such as a fibre-optic signal booster in a cable at the bottom of the Atlantic, or, at the other extreme of the planet, a satellite; both of which (as it happens) are critical to intercontinental telecommunication. Box 3 Routine solution – examples looks at some examples.
Box 3 Routine solution – examples
The Hubble space telescope ( Figure 5 ) was conceived in the 1970s. The intention was that it would capture astronomical images, unimpeded by the Earth's atmosphere, and transmit data and images 640 km back to Earth, enabling us to answer some of our most fundamental questions about the universe. It was sent into orbit in April 1990, at a cost of about US$ 2 billion.
However, just weeks into its flight the mission was very nearly lost before it had truly begun, when NASA scientists discovered that the main concave mirror of the telescope had been ground too flat by a depth of 4 micrometres, resulting in images at high magnification that were too fuzzy to be useful.
The operators who control Hubble's flight work in team rotation, driving it 24 hours a day every day of the year, sending an average of over 100 000 instructions a week. The first opportunity to carry out maintenance, install new instruments and correct the error (by giving it 'glasses' in the shape of five pairs of corrective mirrors) came in December 1993, after two years of planning. Engineers operating the telescope trained extensively for the reconfiguration of Hubble. First the telescope had to be set aside from its usual research operations to a 'ready for servicing' condition and capture attitude, then the aperture door was closed and high-gain antennas stowed. Astronauts on board a Space Shuttle made five gruelling space-walks to carry out the installation work. Once this was completed and tested, both Hubble and the Shuttle were configured for battery charging. When charged, everything on the telescope was reactivated and it was released back into orbit. To everyone's very great relief the mission was a success, and Hubble soon began transmitting the great pictures that had been anticipated.
Why do we describe this as 'routine'? Clearly the solution being sought was not expected to be innovative – the commitment to reflective optics was unchangeable. Similarly, the cost of a series of incremental improvements would be prohibitive. What was called for, and what was done, was routine reconfiguration of the bits.
A less glamorous example is found in electronic circuit design. New amplifiers, data acquisition cards and so on are launched every year.
Many are new arrangements of standard components – resistors, capacitors, integrated circuits, etc. The problem solving here has been concerned with choosing component values and characteristics to achieve enhanced performance.

You should, by now, have a better idea of how to classify solutions to problems, challenges and opportunities. The three groups above overlap. It's possible for a solution to be equally valid in more than one group at a time. It's important to consider the context of whatever you're facing – the invention of the mobile phone was an innovation in terms of electronics, subsequent innovation by development has been largely incremental, and during this development there have been considerable routine design changes. If you're deciding where the solution to a problem belongs, try to narrow it down to its basic elements.
Group the following tasks as being problems likely to find solutions that are routine in nature, that involve innovation by development or require innovation by context :
Making a lighter ladder
Specifying components for a home-computing workstation
Defining specifications for building services in a new factory, e.g. ambient temperatures in different rooms/areas, air conditioning, waste air extraction, etc.
Designing a taller crane
Replacing lead-based solders with non-lead alternatives
Bridging a wider gap
Setting network and modem parameters for an office PC system
Designing an ejector seat for a helicopter (ouch!).
Specifying components for a home-computing workstation (selecting from among existing components)
Setting network and modem parameters for an office PC system (selecting from existing options)
Defining specifications for building services in a new factory, e.g. ambient temperatures in different rooms/areas, air conditioning, waste air extraction, etc. (selecting from among existing components)
Innovation by development:
Designing a taller crane (extend a shorter crane)
Making a lighter ladder (refine the design to reduce weight)
Bridging a wider gap (extend an old design)
Replacing lead-based solders (devise new alloys)
Innovation by context:
Designing an ejector seat for a helicopter (ejector seats were conceived for fixed-wing aircraft and can't simply be transferred to the pilot's seat in a helicopter).
2 Where does the need arise?
There is a rather obvious question that has to be raised at some point, so we may as well get it over with now: Why do we present ourselves with all these problems? After all, life would be easier without them and we could all go off and do jobs that don't involve them. Do we really need to know everything about the universe? Or to send people into space, at significant cost and human risk? Do we really need to send sound and pictures through space? Do we really need to communicate with people we've never met? Do we really need to educate people about health?
I hope you have at least agreed with the last one, and you can probably see a connection that runs through the points that were used as evidence in the last section. What it illustrates is an order of priority of human needs, ranging from the immediate and essential, to the remote and desirable, and that engineers are active at every level.
Arrange the following items in order of human physical need, with the most basic requirement at the top:
Communication
Entertainment
This is only my list, and your own personality will probably dictate how you placed the bottom six. The point is that we can survive no more than a few minutes without oxygen, a day or two without water, and a week or two without food. In extreme environments we can't survive without shelter and/or warmth. As for the rest: well, on this particular scale they can be seen as life's luxuries, although in relatively rich societies we are expecting more and more as our right rather than privilege. Engineers are involved in meeting all these needs at every level and at every depth of complexity.
However you organised the above list, you can see that there is a hierarchy of human requirement where the needs become increasingly refined and complex, and that there are problems, challenges and opportunities for the engineer at every level. All the items in the list could be expanded to consider the engineering involved. Box 4 Meeting the liquid challenge looks at how we meet the fundamental need for a supply of clean water.
Box 4 Meeting the liquid challenges
To all practical intents and purposes, water on Earth is part of a closed system – there is no more or less water on the Earth's surface now than when the first humans were alive. It is approximately 1400 million cubic kilometres of the ultimate recyclable resource, and it is random in its availability. We use it to drink, cook, wash and flush sewers, and without it any one of us would die within a week. Apart from the very air we breathe, it has to be our most basic need.
In temperate zones in the northern hemisphere, we are lucky enough to get a reliable amount of rainfall, which we can store in artificial reservoirs. Water has to be collected from lakes and reservoirs, wells, rivers and underground pools, then treated and transported for domestic and commercial use on a mammoth scale (Figure 6).

Think about the engineering involved in designing, building and lining reservoirs; designing and laying pipes of the right material and capacity; controlling water flow through the pipes; filtration and purification; delivery to domestic and business premises; removing, storing and treating sewage; managing the logistics of supply and demand; and the financial and technical administration of the water system. We may have cause to grumble about the occasional shortage in supply during long dry summers, but our system is generally robust. Generations of engineers have been responsible for the development of reliable water provision around the world (though there are still places where the challenges remain). If you have ever visited a country where you had to rely on sterilised or boiled water, you will appreciate it all the more.
In many poor countries the history of problems caused by drought or contaminated water is well documented. It is currently estimated that 2.4 billion people worldwide lack access to basic sanitation, and over a billion are drinking unsafe water. The engineering challenges posed in these countries (mainly in Eastern and Southern Africa, and South Asia) are different from those met in most of Europe as the rainfall is less reliable, work is often funded by overstretched charities and, although a long-term infrastructure is needed, there is also an urgent necessity to provide instant clean water. Engineers are working on a small, local scale, sometimes having to show innovation with the materials and resources available and meet needs by practicality at the expense of efficiency. They might have to find water below ground, or find a means of purifying water from a river. Engineers may also find themselves becoming educators – passing on their skills and advice to local communities who can then carry out work for themselves.
Internationally, as in any industry, there are groups of engineers and scientists committed to research and development at the boundaries of our existing knowledge. The most recent high-profile discoveries in the water industry are to do with the desalination of sea water, a huge and largely untapped aqueous resource.
Many sectors of engineering are involved in meeting such a basic need as the supply of fresh water. The three classifications of solution – innovation by context, innovation by development and routine – are all represented many times over, and there are numerous angles of opportunity and challenge. If you consider a similar breakdown for each of the needs you listed in Exercise 2 , you begin to get some idea of how and where engineering solutions are required. Here's a summary for this case:
designing, building and lining reservoirs;
designing and laying pipes of the right material and capacity;
controlling water flow through the pipes;
filtration and purification;
delivery to domestic and business premises;
removing, storing and treating sewage;
managing the logistics of supply and demand;
the financial and technical administration of the water system.
3 Needs and problems
The last section has established that engineering is about satisfying needs. In fact, with so many needs, it's a wonder that not everyone is an engineer! So, now that we have talked about both needs and problems, the logical progression is to examine the relationship between them.
Take the water example as being a fundamental need. We can state it thus:
This village needs a supply of clean water.
When given that statement, we have a natural tendency immediately to start looking for potential solutions – a trough for rainwater, purification for river water, a pump for underground water and so on. We will start asking questions to get a clearer definition of the need – What's the average rainfall? Is the village near a river? Do we know of any existing supplies? What physical resources are available? How much water is needed daily – is ten litres each enough? What do we mean by 'clean'? etc. Seamlessly, the need becomes a problem that requires a solution. The definition of requirements makes it precise.
The problem becomes how to transfer and purify sufficient water from a source, say a river, half a kilometre away.
With this amount of detail we have a problem definition, and all that's left is to find a solution …
(a) State, in a few words, the need which prompted the development of the Baylis wind-up radio.
(b) Make a list of bullet points that identify the engineering requirements involved in meeting the need for communication, like the list at the end of Box 4 'Meeting the liquid challenge' .
(a) The need for reliable, affordable access to broadcast health information in remote areas.
(b) adequate radio reception equipment
adequate power provision (clockwork and solar)
adequate manufacture and assembly
shipping and distribution
robust business plan.
4 Looking for solutions
4.1 advancing knowledge.
Over the centuries, engineers have faced and solved a huge number of problems of one sort or another. Each time a problem is solved, knowledge is advanced, something usually gets written down, and so today we have a wealth of experience to draw on. Equally, problem-solving techniques have also been developed and evolved through use and refinement, which is rather handy. Not only do we have some idea of existing solutions to similar problems, but we also have an indication of how to go about finding our own solutions.
As we're trying to get a picture of the whole, let's begin by looking at a typical, simple, problem-solution process and then we can break it down into separate elements. Figure 7 is one attempt to map out such a process, from the top down.

I should add, however, that there is no single right way to do this and there are, inevitably, all sorts of diagrams available to illustrate the process of creating solutions to problems. Engineering is a huge field, and procedures are usually shown with a bit more detail than in Figure 7 because they are specific to, say, software design, mechanical, chemical, civil engineering, etc.
4.2 From a need to a problem
So, working from the top down, the process starts with 'need' and 'problem'; see Figure 8 .
Although we usually work by identifying a need that converts to a problem, that requires a solution, don't forget the extra arrow at the side, taking this first part of the process full circle. The questions that draw out the problem may also refine needs, or indeed extract further needs that were not stated, acknowledged or recognised at the very beginning. We've already looked at where these needs come from on a global scale but, unless you are an academic researcher or a totally independent inventor, by the time you reach this stage of design the need is usually coming very directly from a customer. The customer may be your employer, or an external client, who has somehow identified the need to develop a new product or significantly modify, improve or repair an existing one. It's obvious that the better the specification, the less time and money will be wasted in designing or producing a product or solution that doesn't meet the requirement.

There are different types of specification – for example, a 'product' specification and a 'functional' specification. If the supplier has more knowledge about the specific product than the customer then a functional specification is appropriate. However, if the supplier is just making a design to order then a full product description must be agreed. The writing of these formal documents that attempt to ensure that the solution matches the requirements has become something of an art. The specification may become a legal contract that binds the engineer to the task, instead of a practical guide to the route and therefore the solution to a problem. While nobody would argue that you should not have some sort of guarantee that you're going to get what you are paying for, it does seem to be a shame that the more control is exerted in this way, the less room there will be for creativity and hence innovation in devising solutions. Used properly, the specification can be arrived at by an open exchange of views and ideas between the two (or more) parties involved, so that the engineering team goes away to look for solutions with a clear record and understanding of both the need and the problem. An example of the process that leads to a specification can be seen in Box 5 From problem to specification .
Box 5 From problem to specification
Between the 1930s and 1980s, millions of industrial and domestic refrigerators and freezers were produced which used chlorofluorocarbon (CFC) gases as the refrigerant and in insulating materials. CFC gases didn't degrade the fridge, were non-flammable, not poisonous in the event of a leak, and seemed to be an ideal replacement for the original refrigerants such as ammonia that were smelly, corrosive, poisonous and not particularly efficient. However, it transpired that CFC gases are damaging to the environment, depleting the ozone layer that protects us from the harmful ultraviolet components of the sun's rays. A need was thus identified – for fridges and freezers that are environmentally friendly ( Figure 9 ).

It is worth noting that this statement of needs is not at as fundamental a level as the earlier one in the water example. This illustrates the existence of the hierarchy of need. We need the ability to create cooled environments not only for keeping food fresh, but also for countless industrial processes. We are able to state the need in terms of fridges and freezers because there is a long history of market requirement and product development that moves the starting point of our need statement on from 'we need to keep our food fresh', through 'we need to make things cold' to 'we need fridges and freezers'.
There is a general principle here in the formulation of statements of need: the more fundamental the terms in which it is written, the greater the variety of solutions open for consideration, but the greater the possible number of dead ends. There is therefore a balance to be struck between maximising the chances of a really creative solution, and wasting time considering unsuitable ones. So, the statement 'the village needs a supply of clean water' leaves more options open than 'the village needs a water pump and filtration to get clean water from the river'.
To take this statement of the need the next step forward, we have to write a problem specification, which ideally will contain all the information necessary for working out a set of possible solutions.
Our need was stated as 'environmentally friendly fridges and freezers'. We can further refine this to 'we need alternative refrigerant gases to CFCs'. In doing this, we have excluded the possibility of using an alternative technology to the compression/expansion heat pump that is ubiquitous in refrigerators and freezers. There is a very good reason for this: the closed-cycle mechanical heat pump is the most energy-efficient known means of refrigeration, and to go to something that uses more energy could add an unacceptable environmental cost.
We can now state the requirements for the solution: A refrigerant gas with the following properties:
Not an ozone depleter
Compatible with conventional heat-pump technology
Non-corrosive
Non-hazardous (i.e. non-toxic, non-flammable)
Not an unacceptable source of some other pollution
Able to be manufactured in comparable volumes and costs to CFCs.
This is a technical specification. Clearly, it is at what could be called the top level; there are no numbers against any of these requirements. Once these have been added, though, we will have the beginnings of a formal document to bind the engineer to the task. The specification may even specifically exclude certain types of solution (as with the Hubble telescope repair).
There is a need to reduce the amount of pollution from airborne particulates in cities all over the world. A major factor is exhaust emissions from diesel engines. The search is on for an alternative fuel that doesn't produce the pollution locally.
Write a specification (as a list of bullet points) for an alternative automotive fuel that sets out the problem and is clear about the requirements that must be met in the solution.
The problem is to find or manufacture an alternative fuel for vehicles, because the existing fuels cause too much pollution in the towns and cities where they are used most intensively. The characteristics of the new fuel should include the following:
a significantly lower producer of particulate emissions
not a significantly worse producer of any other pollutants (including CO 2 , which would result if it is less energy efficient to produce and use)
no more toxic in unburnt form than existing fuels
no more hazardous than diesel
approximately the same cost to produce and use as existing fuels and possible to produce in similar volume (in terms not of litres, but of vehicle kilometres) to existing fuels
preferably compatible with existing internal combustion engines, i.e. no solutions that are 'innovation in context' (though not necessarily if a longer-term solution is wanted – vehicle lifetimes are relatively short, so a new technology could be brought in).
4.3 Possible solutions
According to Figure 7 , our map of the problem-solving process, once we've defined the problem according to the need the next step is the creative bit – to look for 'possible solutions', Figure 10 .

Depending on the need, this may require innovation by context, innovation by development or a routine solution. Contrary to what you might expect, innovation is not the only interesting or challenging option – there may be any number of potential solutions using standard parts, but only one really elegant combination. As good engineers, in an ideal context (remember this point), we are not just looking for a solution; we are looking for the best solution. However, although practising engineers will be looking for the best solution, they do not always have the time or resources actually to reach it. Even if they did have as many resources as they wished, it might still not be possible to know what the best solution is, or whether it has been reached. So if the engineer cannot know when 'best' has been reached, we see that compromise is an abiding characteristic of solving engineering problems.
Creative thought has to come without inhibition, influence or bias, and if you consider how difficult that is in the light of the problem in SAQ 3, then it makes sense that we shouldn't just expect it to happen. We can exercise our brain in much the same way as we exercise our bodies, and we can sharpen particular abilities by repeated action of the same or similar process. There are whole courses available in finding creative solutions, working up from simple questions to complex theoretical posers. The more you practise 'thinking outside the box', the better you will become. Foster, in a book called How to Get Ideas , has a good summary:
Think laterally. Think visually. Play “What if?” Look for analogues. Look for things to combine. Ask yourself what assumptions you're making, what rules you're following. Screw up your courage and attack. Foster (1996) p. 159
This is fine for working alone and stimulating your own creativity with no one around to question your ideas. In most commercial or industrial situations, however, you are more likely to be working as part of a group or team. Here, the so-called brainstorming approach is popular. There need not be a hierarchy within a brainstorming group – you mix contemporaries from different disciplines or representatives of other departments, with the assurance that each member is accorded respect and allowed to express suggestions 'without prejudice'. In a group situation everyone should feel totally at ease, free to put forward any idea that occurs, however lateral, apparently silly or unlikely. Next, the group is at liberty to ask questions and put the idea up for enquiry, but reasons to discard any idea must be rational and valid. Thus the atmosphere, relaxed and receptive, is open to completely new and innovative solutions.
Not all engineering is about innovation. Techniques such as brainstorming, used as above, and creating Spider diagrams of ideas, are a way of bringing ideas together, but not all the ideas will be original.
Box 6 Spider diagrams
A technique widely used for stimulating free thought is the spider diagram (sometimes known as a spray diagram). It works on the principle of removing the hierarchy of importance, implied when items are written in list form. Instead, the title of the problem or need is put at the centre, and as items are thought of, they are placed in more or less random positions on the paper. The connections between related items are then represented by lines, to produce a multi-limbed structure that gives the diagram its name. Usually, the process of drawing the relationships between items stimulates the addition of further items. Once the relationships have been made, it is possible to group several items together in themes, and a tree-like structure emerges. The diagram is now useful as a map of the whole topic, its critical issues, and the relationships between them. Figure 11 is an example.

In all but the most 'blue sky' organisations, constraints are present in terms of cost, time, capacity, environment, manufacturing capability – you think of it, it's a constraint. Add to this the limits imposed by our knowledge of the physical world – things like data storage capacities, material, fluid or gas properties, Anthropometrics and ergonomics and so on – and the problem up for attention has either shrunk significantly or has become more complex.
Box 7 Anthropometrics and ergonomics
An engineer uses anthropometric data when designing something that will be operated or used by a person, or rather more specifically, by any unknown person. It represents the weight and measurements of the average man, woman and child, usually presented in centiles (the 50th centile being the median average), and covers everything from basic height to the length of a little finger.
What the average person can do , on the other hand, is presented as ergonomic data. This is about how hard we can push, what pressure we can exert on a foot pedal, the most comfortable reach, etc. In the same way that we use tables of data for solid, gas or fluid properties in the specification of materials, we use anthropometrics and ergonomics to design for people.
Tables 2 and Tables 3 show the kind of information that is typically gathered and used.
| Male | Female | |||
|---|---|---|---|---|
| Body dimension | Mean/mm | SD*/mm | Mean/mm | SD*/mm |
| Stature | 1740 | 70 | 1610 | 62 |
| Eye height | 1630 | 69 | 1505 | 61 |
| Shoulder height | 1425 | 66 | 1310 | 58 |
| Elbow height | 1090 | 52 | 1005 | 46 |
| Sitting height | 910 | 36 | 850 | 35 |
| Sitting eye height | 790 | 35 | 740 | 33 |
| Sitting shoulder height | 595 | 32 | 555 | 31 |
| Sitting elbow height | 245 | 31 | 235 | 29 |
| Thigh thickness | 160 | 15 | 155 | 17 |
| Buttock-to-knee length | 595 | 31 | 570 | 30 |
| Buttock-to-popliteal length | 495 | 32 | 480 | 30 |
| Knee height | 545 | 32 | 500 | 27 |
| Popliteal height | 440 | 29 | 400 | 27 |
| Shoulder breadth (bi-deltoid) | 465 | 28 | 395 | 24 |
| Hip breadth | 360 | 29 | 370 | 38 |
| Chest (bust) depth | 250 | 22 | 250 | 27 |
| Shoulder-to-elbow length | 365 | 20 | 330 | 70 |
| Elbow-to-fingertip length | 475 | 21 | 430 | 19 |
| Forward grip reach (from the back of the shoulder blade) | 780 | 34 | 705 | 31 |
| Upper limb length | 780 | 36 | 705 | 32 |
*SD=standard deviation, representinga statistical departure from themean value.
| Thumb | Index finger | Middle finger | Ring finger | Little finger | |
|---|---|---|---|---|---|
| Mean force/N | 17 | 11 | 10 | 8 | 5 |
| Range/N | 14–20 | 8–14 | 8–12 | 5–10 | 3–9 |
The back of a particular airline seat is 100 mm thick. Explain why it would be unreasonable to install 12 rows of seats in a cabin with a floor length of 7 m. Suggest, with a brief justification, a more reasonable number of rows.
The space available per seat with 12 rows in 7 m would be
Of this, 100 mm must be allowed for the seat back, leaving just 483 mm for passengers' legs. According to Table 2 , the mean buttock-to-knee length of an adult male is 595 mm and that of women is 570 mm. Thus, there is insufficient space for an average man or an average woman.
A more reasonable capacity might be based on the mean, male, buttock-to-knee length (595 mm) plus one standard deviation (31 mm), plus the depth of the seat back (100 mm) for each seat. That amounts to 726 mm per seat. The number of rows would then be 7000/726 = 9.6; in practice this would need to be rounded down to 9 rows with 777 mm per seat.
For comparison, typical economy-class seat spacings are 710 to 860 mm, and the UK Civil Aviation Authority's current minimum (under review) is 660 mm.
The search for solutions must involve a thorough appreciation of the problem. It may involve detailed analysis and calculations based on scientific and engineering principles and using technical data. This is mathematical modelling, and it is useful at many stages in the process of identifying solutions; it is specifically addressed later in Section 4.5.
In practice then, finding a solution is usually a delicate balance between finding 'the best design' and getting something into the market-place 'by yesterday'. Earlier on I asked you to remember a point:
As good engineers, in an ideal context, we are not just looking for a solution; we are looking for the best solution.
Now you see why I added the condition about context. I think that any course that hopes to contribute to the formation of professional engineers has a responsibility to make this clear. Over the duration of an engineering qualification, you will learn a little about many of the tools you need to solve problems. You are likely to specialise, and learn more about, say, mechanical, civil or electrical engineering, building services, software, chemical processes, nuclear power and so on. It would be impractical to expect you to study every problem-solving technique tailored to every conceivable context. However, a good course of study will make sure that you are aware of the constraints that we have discussed above, and that you have some practice in bringing together maths, science or technology in ways that create practical, physical solutions. That way, when you call on your skills 'for real', you won't be surprised when your 'best' solution is ditched in favour of the one that has a quarter of the durability but costs half the money and can be made within the organisation. Instead of being depressed about this, understand and use those constraints to shape your next design; if you know that such limits will be imposed, make them your goals and work to achieve them.
Getting back to our problem-solving diagram, you may have noticed that Figure 10 shows another circuit – a loop from possible solutions, to evaluating solutions, and back to the problem. You may also remember that the problem is linked back to a need ( Figure 8 ), and so at this stage any suggestion may take you right back to the start, asking new questions about the need and refining or redefining the problem, quite possibly by going back to the customer. The trick here is not to redefine the problem in order to suit your solution, but to be sure that your solution is meeting the need .
4.4 Evaluate solutions
If the obvious solution has been identified and everyone is in agreement, then a formal evaluation of solutions is unnecessary, and we would move on to modelling the design. However, if there is dissent then some stricter method of elimination is required, and this is usually achieved through a process of rank-ordering. There is little to be lost and potentially much to be gained by returning to the customer at this point for opinion, clarification or guidance.
4.4.1 Selecting the best candidate
Assuming there is more than one likely looking candidate solution, we need to make a selection now so that we don't waste time taking all the candidates through the next steps, which become progressively more expensive and time-consuming. The rigour and formality of this step is very variable, but in general all schemes boil down to the same process you might use to choose some consumer item, such as a TV set. You would have a list of criteria that are important to you, and you would evaluate each candidate against those criteria. In many cases the list is short enough, or a single criterion of such importance relative to the others, for it to be possible to have it in your head. Usually it is worth writing down that list (which should look like the specification), and assigning a weighting to each criterion according to its relative importance. You then give each candidate solution a score against each criterion. When multiplied by their respective weightings, these scores add up to a figure of merit for each solution. The one with the largest number wins.
A benefit of using a system such as this is that it tells you quantitatively what kind of a 'squad' of substitute solutions you have to draw from (to use a sporting analogy). This is important because it tells you whether or not you really ought to take more than one on to the next step and beyond, until there is a clearer preference. It also tells you whether or not you have only one possible solution that's going to be worth considering. If this is the case, it may be good news if you are confident it will work, or it may prompt you to go back now and try to generate some more ideas.
Let us try this approach with the example of choosing a TV set. First, we ask what are our criteria, and what relative importance do we attach to each of them? This can be set out in a table:
| Criterion | Relative importance (weighting 0–10) | |
|---|---|---|
| 1 | Large screen | 8 |
| 2 | Good picture quality | 10 |
| 3 | Good sound quality | 8 |
| 4 | Compatible with other audio/video systems | 10 |
| 5 | Attractive cabinet | 5 |
| 6 | Cost | 10 |
Next, we need to score each of our candidate models of TV set against each of the criteria, then multiply the scores by the appropriate 'importance' weighting.
| Model 1 | Model 2 | Model 3 | ||||
|---|---|---|---|---|---|---|
| Criterion | score (0–10) | × weight | score (0–10) | × weight | score (0–10) | × weight |
| 1 | 10 | × 8 | 6 | × 8 | 6 | × 8 |
| 2 | 6 | × 10 | 5 | × 10 | 10 | × 10 |
| 3 | 5 | × 8 | 4 | × 8 | 6 | × 8 |
| 4 | 10 | × 10 | 0 | × 10 | 5 | × 10 |
| 5 | 3 | × 5 | 10 | × 5 | 8 | × 5 |
| 6 | 8 | × 10 | 7 | × 10 | 10 | × 10 |
| Sum of weighted scores | 375 | 250 | 386 | |||
For each model we arrive at the sum of the weighted scores.
On the basis of this, we might eliminate Model 2, but we might need to consider some additional criteria to choose between Model 1 and Model 3.
4.5 Model the best solution
In moving from the 'possible solutions' to the 'best solution' box, Figure 12 , we have to assume that a certain amount of evaluation has been done in the previous loop. The solution is still on paper, and probably not much more than a sketch, but something is badly wrong if the best solution to come forward has not been recognised to be at least feasible in the most basic terms of function, cost and implementation. The next step is to model the solution to estimate how well it will perform. Depending on the subject of the problem, this could take many forms.

The model itself doesn't have to be physical and sometimes a mathematical model can be used. A pretty thorough knowledge of relevant physical properties of real systems, materials and structures is required if a model is to be of any practical use.
4.5.1 Mathematical models
Computers in the last few decades have, in many cases, made mathematical modelling a lot easier. Models that used to require hours of manual cranking through long equations can now be created on a screen using specialist software. Processes can be recreated – modelled – in the time it takes to press a few buttons.
For example, when designing a pipe network to carry a gas or fluid, such as in the village water supply problem, you might wish to know how the flow would be distributed within the network, i.e. at what rate the fluid would exit from each distribution point. In order to calculate this, you would need figures for: fluid density; the number of pipes in the system; the length and diameter of pipes joining each connector; the friction factor for each pipe (a constant determined by the roughness of the pipe wall); pressure losses at the pipe fittings; volumetric inflow at each connector; and so on. Imagine the calculations necessary to cover all of these, in what is actually a relatively uncomplicated arrangement of pipes.
Engineering has a whole host of branches, covering a huge variety of physical quantities. The following are examples of where computer-based techniques are used.
Thermal and stress analyses model the distribution of quantities like temperature and stress across a shape or an area, and are useful for spotting potential weak points in a design.
Computational fluid dynamic studies analyse turbulent flow in gases and liquids, such as in the simulation of weather.
Universal Modelling Language simulates computer software.
Circuit simulators model the performance of electronic circuits.
Of course, not all modelling is done on computers. Creating a mathematical model of something can be as simple as drawing a picture, putting in the mandatory dimensions and using the diagram or some simple calculations using algebra to determine the remaining quantities. For instance, look at the Box 8 Mathematical modelling example .
Box 8 Mathematical modelling example
In another aspect of the village water supply problem outlined earlier, part of the design of the network may include some sort of storage tank. Let's assume that the tank is cylindrical and that it has been specified to be capable of holding 1500 litres (1.5 m 3 ). In order to keep costs down, we want to use the minimum amount of material in constructing the tank and must therefore use mathematics to model the problem, finding the minimum surface area capable of holding the required volume.
The first step is to write down algebraic expressions for the key factors – volume and surface area in terms of the unknown quantities (radius r and length l of the cylinder) that are to be determined.
Surface area (two ends plus the side):
Next, combine these expressions by using information from one equation to simplify the other.
Rearranging the equation for volume to express it in terms of length:
We can substitute this expression for l into that for the surface area, bringing the problem down to one unknown, r , as the volume V is specified:
Multiplying out and tidying up:
There are two ways to find the minimum area for the required volume. The first is trial and error, for which a calculator or computer spreadsheet is invaluable. Try, for instance, a radius of 1 m and one of 2 m – which gives the smaller area? What value would you choose next? Try it. Often plotting a graph of the results helps you see where to direct your attention.
The second method is based on calculus, an analytical technique that should be familiar to you from your study of courses in mathematics. If it is not, you will have to stick to trial and error. For those who can follow it, the calculus approach is given below; otherwise move on to the text following Figure 13 .
Differentiate the expression for the surface area with respect to r :
For maxima and minima, d s /d r = 0 (remember that d s /d r is the gradient of the curve of s against r ), so:
Substituting the value V = 1.5 m 3 :
We can use the earlier expression for the volume to find l :
Mathematical modelling tells us that the tank must be 1.24 m high with a radius of 0.62 m – that is, the length l is equal to the diameter (2 r ). Figure 13 shows how the shape of a cylinder looks as the ratio of r and l varies. It is obvious from our everyday experience that the cylinder which will hold the most water is the one that is neither extremely thin nor extremely short. Our numbers from the calculation look reasonable in this respect; if you looked at the cylinder side-on, it would look square.

In the mathematical modelling example we arrived at an 'optimum' cylinder which had a square cross-section (diameter equal to its length). But let's challenge this result by asking if any assumptions have led us away from the best solution.
A major assumption was made in setting up the problem, just before the mathematical modelling was presented. What was it? Do you think it was a reasonable one?
Can you think of reasons why the cylindrical shape may not be the best solution to this very specific problem?
Hint : think about the context and how this imposes constraints of its own.
The assumption was made that a cylindrical shape is going to be the best, and all we need to decide is the ratio of length (or height) to diameter. In fact, the shape that encloses the largest volume with the smallest surface is a sphere.
It seems reasonable to assume that, in this context, a spherical shape should not be used, as the problems of forming and joining or welding the sheet are considerable, and the necessary equipment is not likely to be available.
Here is my list of reasons why the cylinder may not be preferred – you may have thought of others:
the shape of available sheet material
the ability to cut circles and form the sheet into curves
the space it has to fit in
cultural preference for or aversion to a particular shape.
Making the cylindrical tank from a rectangular sheet of metal will create offcuts of material where the top and bottom circles have been cut out of the sheet. Show that if the most efficient cuboidal shape had been used instead (i.e. a cube), it would use less sheet material than the cylindrical shape. Assume that the width of the sheet material for each case is ideal.
The total area of the sheet is therefore 7.866 m 2 .
To make the tank cylindrical, we need the dimensions previously calculated, i.e. a diameter of 1.24 m and a height also of 1.24 m.
If our sheet of metal was 1.24 m wide, we could make the two ends and the sides of the cylinder from a piece that was (2 × 1.24) + (π × 1.24) = 6.376 m long – sketch it if you need to.
This has an area of 1.24 × 6.376 = 7.906 m 2
The cylindrical tank uses 7.906 − 7.866 = 0.040 m 2 more sheet material (but this difference is only about 0.5%).
4.5.2 Physical models
A physical model of an artefact or component is often built on a reduced scale, in size and/or by using materials that are cheaper and easier to manipulate than those intended for production. At this stage, we are not necessarily producing what you might think of as a prototype, but investigating particular aspects of the design. For instance, maybe we would produce a racing-bike frame to a new design but in a cheap material such as balsawood, in order to assess the air flow around it in a wind tunnel.
A good example of this is the way modelling was used in solving the problem of the steering for the Thrust SSC supersonic car ( Figure 14 ), the first land vehicle to travel faster than the speed of sound (Mach 1), covering a kilometre in an amazing 2.9 seconds.

One of the first questions that needed to be asked, even before aerodynamic issues were considered, was 'can a rear steering mechanism work at speed?'.
Ron Ayers, the engineer in charge of aerodynamics on the car, explains:
[So] we had to steer with the rear wheels. As soon as we suggested that, all the experts on car dynamics waved their arms in the air and said it was unstable, it could never work, think of forklift trucks and shopping trolleys and other irrelevant comparisons. However, Professor Crolla at Leeds University did a theoretical study for us and said yes, it could work under certain circumstances and gave us those circumstances. There were, however, still plenty of critics who said it wouldn't work. The rear-wheel steering Mini was built to demonstrate that you can steer a vehicle from the back [ Figure 15 ]. Although it's a lot smaller than Thrust SSC, the wheel configuration and track, etc., is in fact a scaled-down version of the full-sized car. We drove that ancient Mini with this kind of extension out the back at 90 mph up and down the test track at MIRA and proved that it was very controllable – that we really could, with finger-tip control, keep it on the line. Glynne [Bowsher, the mechanical and structural designer] designed it and built it with his brother-in-law. It's his brother-in-law's Mini, actually. I think they spent £300 and it cost three weeks and two near-divorces.

Figure 15 shows that the model looks nothing like the car that in 1997 made engineering history by smashing the barrier of sound! The Thrust team used mathematical and physical modelling intensively throughout the development of the car. Given the costs involved in trialling the final product, they needed to be as sure as possible that it was going to work. A model is built to prove it will work and to collect data or to test some aspect of design.
Identify which aspect of the Thrust SSC was not being addressed by the physical model using the adapted 'Mini'.
The most important aspect of the Thrust SSC not addressed by the physical model is the aerodynamics and how this affects the steering at full speed.
We will return to modelling at the end of this free course on the problem-solving process. When we look at it again, we will present two contrasting cases. The first is a familiar product, namely the bicycle, and will show the merits of careful 'hand calculations'. The second, probably less familiar, is an acceleration sensor for triggering vehicle airbag systems. It will illustrate the use of a more complicated, computer-based model.
4.6 Assess and review
Following our problem-solving map, we have reached the stage of 'assess and review solution', Figure 16 .

If we've got everything right first time in the preceding stages, then the solution successfully meets the need, with no obvious nasty side effects, and we can pass directly to 'build prototype/demonstrator', pausing briefly for cheers and back-patting all round. On the other hand … this may be the time to recognise that the 'best solution' hasn't worked. This isn't necessarily as disastrous as it sounds; unless the solution was particularly simple, there are likely to be elements that have been found to be successful where others have not. This usually means that you are not entirely back to the drawing board, but will have to revise the bits that haven't worked and replace them with other suggestions that have been on ice from the 'possible designs' stage. If we were prolific with ideas then there may be an orderly queue of replacement solutions, such as alternative materials, configurations of components, substitute objects (in software design) or whatever. However, if there is no obvious alternative then we may end up having to reconsider the original need ( Figure 17 ).

There's no shame in going back to the customer at this point and asking for clarification. It may even be that your solution worked according to the need they expressed, but some incidental aspect has proved unworkable and so the problem needs restating. Returning to the water problem and the need to transport water from the river – perhaps you have discovered that the flow of the river isn't enough to meet the needs of the village. In this case, there is no need to abandon the solution entirely, as it will still be possible to supply water from the river, but a supplementary water source must be identified and harnessed, and this will be the new problem. You put forward possible solutions … and so the cycle begins again.
4.7 Build prototype/demonstrator
The physical models we talked about earlier are prototypes or demonstrators of a sort. However, for the purposes of making a clear distinction in the process, I'm referring here to prototypes or demonstrators as functioning preliminary models of the essential finished product or construction or service, bringing together all the elements of the design that may or may not have been previously physically tested ( Figure 18 ). This is still a model – if appropriate, it may be a full-sized, full-colour replica – but it may also be a scaled-down version where only the vital working parts are fully functioning.

In the village water supply problem, you may produce a model version of the layout of pipes to ensure that they will conform to the landscape, or you may not need to produce a demonstrator at all. The point is, where necessary, to make sure that all the essentials will come together and operate as anticipated.
In software design, for example, the prototype may be a program that combines all the essential elements of code, written by various teams and controlling various parts, but with a dummy user interface. The vital commands will be in place, but asides such as 'glossy' add-ons (for example the electronic games on a mobile phone) are not necessary to the success of the solution, and may be designed separately and added to the overall design at a later stage. Note that to do this, you have to be very sure that these extras will not affect any important aspect of the rest of the product. In a well-run project, you will have to prove to the rest of the team or the project leader that this is a valid assumption before being allowed to leave it off the demonstrator.
Put simply, with good planning and thorough preparation and groundwork the demonstrator should work when tested in the conditions in which it will be expected to perform.
4.8 Assess and review again
If you've been following the stages of our problem-solving map, then the chances are you're ahead of me here ( Figure 19 ). Yes, if it works, hurrah; if it doesn't then off we go again, all the way back to 'possible solutions' and selecting the best of the rest. Or maybe even going back to the beginning. No one will be amused by a failure at this stage, when considerable investment in time and money has already been made. We should be looking at fine-tuning only, collecting data to give the marketing people, and finalising decisions about fabrication, manufacture, production quantities (if relevant) and processes. In mathematics, this process of refining a solution to get ever closer to a final value is called iteration.

4.9 Final implementation
The line you take here obviously depends on the problem you set out to solve. If you were creating a new product for retail or industry, then the final step of the process would be to put that product into manufacture and watch it go off into the world to begin its life cycle ( Figure 20 ). If the solution were a one-off, such as the village water supply problem we considered at the start, then it would be built and installed.

Not all engineering problems will fall neatly into this pattern, inserting need at the top and extracting a solution at the bottom. Furthermore, not all problems and challenges are to do with designing something from scratch – many real challenges are concerned with a more restrictive need to improve or repair an existing system. Engineers work in different ways, under a variety of conditions and often without the luxury of the time, resources or finance it would take to follow the above process to the letter for every need that was presented. The process will vary according to the nature of the problem, and the experience and understanding of the team engaged to find the solution.
Explain why the list of criteria used in selecting the best candidate solution will look like the specification. State the reason for assigning weightings to each criterion.
The specification should be the document that defines everything that is wanted from the solution. Therefore this is the most natural basis from which to generate the list of selection criteria. A full specification will contain a large number of items, including some which are preferences rather than absolute, hard-and-fast necessities. If no weighting is applied, then the ranking of the candidate solutions could be incorrect in relation to the real need, simply because the best solution has a lower score on several relatively unimportant criteria.
In the next two sections I want to show some aspects of the problem-solving process at work.
5 A problem in bicycle design
5.1 the development of the bicycle.
Section 4 has looked at how we can follow a logical route or map, from the expression of a need, to arrive at possible solutions to a problem. In Sections 5 and 6 we look in more detail at two quite different examples of engineering problems. Our first example is the historical development of the bicycle frame; the second concerns a vital component of a car's airbag system.
The weight of a bicycle frame is a major burden that the cyclist has to bear. There have certainly been times when I felt I needed a lighter bike, usually when going up hills. So, I want us to begin 'identifying and evaluating solutions' for the problem of how to make a bicycle frame lighter, while retaining its performance. A little historical background is important as we are not the first to address this problem.
The modern bicycle frame is central to a huge international business, dominated by American and Chinese markets. In the USA, current estimates put the market at about 15 million bicycles per annum and, in an increasingly environmentally conscious society, the future looks pretty much guaranteed. In this context, the bike is a mature product in an established market, but at some point in history there were no bicycles and the first design must have been produced in order to meet a need. We can guess that this need was for a mode of transport that was quicker than walking and that didn't need feeding.
In fact, the first vehicle that worked with two wheels in a line (the very basic characteristic that came to define a bicycle) was introduced in France in 1791 with a non-steering front wheel, no pedals and a wooden horse's head! For its time, this 'bicycle' was an innovation, and unbelievably it didn't change much for the next twenty years or so. In 1817 a steerable front wheel was introduced (in Germany) and pedals made their first appearance in 1839 (in Scotland). The chain, the sprocket-driven rear wheel and equal-sized front and back wheels were added in England in the early 1880s and were followed by pneumatic tyres, two- and three-speed hub gears and then derailleur gears before the turn of the century.
Each of these major changes came about through engineers finding solutions through innovation by context, but along the way there were literally hundreds of small innovations by development and numerous routine design improvements. For example, in 1879 Charles E. Pratt wrote in his handbook The American Bicycler :
From 1868 until the present time the patented improvements have been numerous, and the mechanical details of construction have been thoroughly worked out, until the machine has become a marvel of ingenuity and of workmanship; and the modern bicycle has been developed to its present state of perfection in strength, lightness, ease of propulsion, certainty of control, and gracefulness of design and operation.
This is an accolade that would swell any engineer's head, but it implies that any advances since 1879 have been extraneous!
The pneumatic tyre was a novel use of a sealed tube of pressurised air to provide the running surface of a bicycle wheel. Say whether you view its introduction as an innovation or a routine improvement.
The pneumatic tyre was an innovation by context. Tyres had not been made in this way before, though the idea of sealing pressurised air into a container was not new (e.g. balloons, footballs, etc.).
An interesting aside to the technological advancement of the bike is in respect of the effect that engineering has on society. The bicycle is generally attributed as being pivotal in the liberation of women in the USA and Europe. Women in England were able to travel independently and in relative safety for the first time, particularly after Queen Victoria made it a socially acceptable practice by riding her tricycle alone in public. A postmistress in the USA, Amelia Bloomer, designed the first trousers for women – bloomers – specifically for riding bikes. The same Amelia Bloomer went on to spearhead the Suffragette fight for women's right to vote in the USA.
Bringing the bike up to date, the maturity of the contemporary model can be seen by comparing Sir Edward Elgar's Sunbeam of 1903 ( Figure 21 ), a relatively sophisticated design in the history of the bike, with a modern all-terrain bicycle ( Figure 22 ). The ancillary equipment has changed but the functional form of the frame structure is still based on a triangulated tubular diamond shape.

Today's market for bicycles is highly competitive, and manufacturers strive to appear better by being different. The 'engineering problem' that I identified at the start was to do with making a lighter frame. It is important therefore to separate real structural and performance improvements to the frame from fashionable gimmicks that might even add weight. To facilitate such comparisons it is necessary to understand the fundamentals of the product, and that calls for a bit of modelling.
So, back to basics: what is a bicycle frame?
Write a brief specification (five or six lines) for a bicycle frame, considering its physical form and what it must be physically capable of achieving.
In engineering terms the need is for a space frame that enables two wheels to be held in place and supports the forces developed by the rider's mass and his or her efforts. The frame should be rigid enough to keep the rear wheel in line with the chain wheel, which is attached to the pedals. In addition the front forks must also rotate to allow the front wheel to steer at low speeds.
The bicycle can be seen as a variation on a seven-membered truss ( Figure 23 ), a frame structure that is a common element in structural and mechanical engineering.

If the axles of the wheels replace the side supports, the bike begins to reveal itself, as shown in Figure 24 .

This structure is capable of supporting a central load as shown and will clearly subject the truss-based space frame to the same in-plane forces – compression in the struts and tension in the tie-wires. There are only a few simple adjustments left to turn the basic structure of Figure 24 into a 'functional' bicycle frame configuration, Figure 25 .
One of the tie-wires has been removed in order to allow the front wheel to rotate, and the strut attached to the front wheel has to be free to rotate at the pin joint. Add a saddle, chain, pedals and handlebars and away you go.

By making a comparison with a simple structure that can be fully analysed, we have been able to confirm the fundamental elements of the bicycle structure, the bit that carries the major forces. However, there is a difficulty. As we shall see in the next block, Figure 24 represents what is called a statically determinate structure. Removing one component risks turning it into a mechanism: that is, it may change shape in response to forces. Removing the bottom-left tie in the truss of Figure 24 would cause it to collapse unless something were done to rectify or compensate for its absence. If part of the top-left pin joint is fixed and does not allow the attached side-strut to swivel about the joint axis, the strut is turned into a cantilever, which restores stability to the structure but at a price. The original strut, now acting as a cantilever, is no longer subject to just axial compression, but has additional forces that lead to bending about the frame region called the headstock. Such a configuration creates high stresses in the material, in this case reaching a maximum at the top of the cantilever fork close to the headstock. The relatively simple problem of allowing this cantilever to rotate is soon solved by the use of bearings that can support forces whilst rotating. Hence, the 'bicycle' shown schematically in Figure 25 could function, if manufactured from adequate materials for the struts, ties and cantilever.
The next thing to do is to see how we can, in general, evaluate solutions based on different materials. Then we'll reintroduce the specific needs of a bicycle frame.
5.2 Material comparisons
I want to depart from the specific example of the bicycle to make some more general points.
In most simple structural analysis the self-weight of the structure is ignored, as it is considered to be small in comparison with the loads carried. However, as an illustration of engineering practice in the search for efficient structures to employ in product design, it is worth examining how the strength and weight of particular materials compare.
These comparisons are illustrated through the use of modelling. As an example, let's estimate the maximum length of a hanging tie-rod and the maximum height of a column. See Box 9 Long ties and high columns .
Box 9 Long ties and high columns
Figure 26 shows a parallel-sided rod of material of density ρ and yield stress σ y hanging from a support.

The stress in the cross-sectional area A increases on each horizontal plane as you go up the rod. It will fail by yielding in the uppermost section when the stress there reaches the yield stress, which is a characteristic of the material. If this occurs when the rod is h metres long, we can say that:
Force on the failure plane
If the material yields then the force on the plane at failure =
Hence, equating these values gives:
Notice that the cross-section term A cancels out from the equations.
A mild steel has a density of 7800 kg m −3 and yield stress 300 MN m −2 What is the maximum length of rod that could be dangled from a high building without yielding under its own weight? Take g = 9.8 m s −2 .
Using the equation σ y = ρ gh , and rearranging:
Hence the rod could be almost 4 km long before it would break under its own weight.
But could we build the tower from which to hang this extremely long rod?
Consider building a brick tower from which we could suspend a rod for testing. Brick has a crushing strength σ c of 70 MN m −2 and a density of 2000 kg m −3 . What is the maximum height of a parallel-sided tower that can be built without crushing the bottom course of bricks? Assume the mortar thickness to be negligible and of higher strength.
The relevant equation comes from relating the weight of bricks above the bottom layer to the force required to crush it. The result is:
The crushing strength and density of the brick are inserted into the formula to give:
That's right, over 3.5 km (2 miles) high!
Hence the crushing strength of brick would limit the construction of a tower to test the steel rod. You would have to taper it to be narrower at the top.The limiting equation for both long ties and struts is:
Rearranging this gives a general expression for maximum length in terms of the maximum self-supporting height:
Now (1/ g ) is a constant, and if g stays constant h is proportional to (σ/ρ). This quantity is a measure of a material's ability to support itself in tension or compression (depending on which value is used for the strength). It is called a 'merit index for self-supporting strength. This means long self-supporting ties and long self-supporting struts are more feasible if the merit index (σ/ρ) is big. Not surprisingly, this occurs with high-strength, low-density materials.
5.3 Back to the bicycle
Let's assume that our bicycle frame could still be constructed from ties and struts. If we want to select the material to minimise the weight of a frame for a particular frame strength, we need to devise a merit index as follows.
The mass of the tie-rods and struts needed for the frame is given by:
where h is the length of a component and A is its cross-sectional area. The failure force for tensile yielding, F , is given by:
in which σ y is a property of any chosen material. Eliminating A from Equations (1.1) and (1.2) gives:
Usually we want a materials-based index that gets bigger the better the material. Hence it is better to express our index in terms of (1/ m ), which gets bigger the lighter the frame.
Hence, rearranging Equation (1.3) gives:
Now for a tie-rod of particular length h , able to resist a particular force F , the bigger the value of the material merit index (σ y /ρ) the lighter the frame could be for the same performance.
From identical considerations, the bigger the value of (σ c /ρ) the lighter a frame could be made for a specified performance.
Using a comparable approach you can also select a merit index to find light struts and ties that limit elastic strain, giving a particular deflection under a given load.
In these circumstances selecting the material with the highest value of ( E / r ), where E is the Young's modulus, has the potential to give the lightest frame components that deflect by a particular amount under load.
Table 4 shows absolute values and some merit indices for a range of recently used frame materials.
| Characteristic: | σ | σ | ρ | ||||
|---|---|---|---|---|---|---|---|
| Units: | MN m | MN m | GN m | kg m | kN m kg | kN m kg | MN m kg |
| Material: | |||||||
| Alloy Cr—Mo steel | 700 | 700 | 210 | 7870 | 88 | 88 | 26 |
| Aluminium alloy | 350 | 350 | 70 | 2800 | 125 | 125 | 25 |
| Titanium alloy | 650 | 650 | 105 | 4500 | 144 | 144 | 23 |
| Carbon-fibre composite | 500 | 200 | 60 | 1100 | |||
| Magnesium-based alloy | 300 | 300 | 45 | 1780 | 176 | 176 | 25 |
You can see the great potential for carbon-fibre composites and the strong competition between the other frame materials, particularly for the deflection-based index E/ ρ. However, there are three major limitations that need consideration before we all go out and start manufacturing carbon-fibre bike frames for a living:
Firstly, because the frame is subjected to much more complex load patterns than axial tension and compression within ties and struts, it turns out that additional merit indices are required.
Secondly, the figures for carbon-fibre composite are based on idealised production conditions where the optimum amount of carbon fibres can be reliably incorporated into the appropriate matrix, whereas the figures for the metallic alloys are those that can be expected regardless of manufacturing conditions.
Finally, the techniques needed to manufacture advanced composites in complex three-dimensional shapes with good surface finish are extremely expensive, so the external factor of cost limits the potential market to the successes and failures covered in Box 10 Carbon-fibre composites to win at all costs .
Box 10 Carbon-fibre composites to win at all costs
The development of commercially viable carbon fibres for engineering purposes was only made possible because large quantities, supplied to the sports goods industry, sustained early progress and allowed prices to fall to acceptable levels. The fishing rod and golf club shaft industries have to be thanked for supporting the manufacture of very expensive early production quantities. The high ratios of tensile strength to weight allowed golf club shafts to deflect to higher values without snapping. For some players this increased the distance of their tee shots. The same properties were also very attractive for whippy fishing rods that had higher strengths than equivalent bamboo and glass-fibre predecessors, Figure 27 .

Identify the types of need for which carbon-fibre tubes are attractive solutions.
The need is for lighter tubular structures that have the same, or better, strength and stiffness characteristics as compared with conventional materials.
More recently, carbon-fibre composites have been used to make other simple structures that benefit from the high E/ ρ ratio for the material. Lightweight products that give minimal deflections include wing sections for aerospace vehicles and racing cars ( Figure 28 ), and 'roach poles' for fishing, which make it possible to use a particular technique to reach further across wide stretches of water than was previously manageable.

Very recently there have been some great successes and failures associated with complex three-dimensional carbon-fibre composite products. In cycling, a carbon-fibre composite frame which is very light and very stiff has been found not to be indestructible – at least one has failed in an accident under conditions that a metal frame might have survived.
Many short stubby struts, or 'chocks', used for supporting dry-docked ships, stored goods, vehicles and the like, need to be made as cheaply as possible. Figure 29 shows an example of a cardboard pallet. Table 5 gives values of crushing strength ρ c and cost C in euros per cubic metre for some materials.
(a) Derive a merit index that increases as the total cost K of supporting compressive load L with a strut of height h decreases. Hint : You will need to introduce the cross-section area A into the total cost and the maximum load – you can then eliminate it from a combination of the two expressions.
(b) Calculate the index for the candidate materials in Table 5 , and select the cheapest option.

| Material | Crushing strength σ /MN m | Cost /€ m |
|---|---|---|
| Softwood | 7 | 40 |
| Hardwood | 15 | 20 |
| Mild steel | 300 | 1500 |
| Recycled thermoplastic | 18 | 560 |
| Cellular cardboard | 0.7 | 15 |
The cross-section A needed is given by:
The total cost K is given by:
The number 1/ K will increase as the cost K goes down.
Rearranging the equation and substituting for A gives:
Hence for a fixed load L and strut height h the required merit index is σc/C . Hence, not surprisingly, materials with a high crushing strength to low cost per unit volume are preferred. You should note that this analysis does not place a limit upon the space required by the cross-section of the strut A , which can get large for low-density materials. I have calculated the merit index for each of the materials, Table 8 .
| Material | σ / / MN m |
|---|---|
| Softwood | 0.17 |
| Hardwood | 0.75 |
| Mild steel | 0.20 |
| Recycled thermoplastic | 0.03 |
| Cellular cardboard | 0.05 |
So at these prices the preferred chocks are hardwood, followed by mild steel, hence their prevalence in commerce for such tasks. Note that, although the crushing strengths are unlikely to change, the relative prices can change in response to local availability, which can influence the merit index.
Returning to the analysis of the bicycle frame, although the frame shown in Figure 25 could function, its performance would be limited to resisting forces in the vertical plane of the frame. Unfortunately, it is essential that frames resist the out-of-plane forces that are generated when a cyclist leans the bike over for hill climbing, sprints and cornering as shown in Figure 30 .

This is when the maximum stresses are generated, as other forces add to the rider's own body weight. Flexible tie-wires and even thin rods have no resistance to such bending forces and so must be replaced by solid cantilever devices that have bending and torsional resistance, to limit the deflection shown in Figure 31 . The pin joints are also eliminated to add to this bending resistance.
Finally, as can be seen in Figure 31 , the rear triangle is divided to allow the rear wheel to be centrally located, and the front forks are usually divided in a similar way to produce the familiar bicycle-frame configuration. Such deflections are an indication of the overall frame stiffness.

In this section, although we have revealed the potential for using different materials, we have not found a 'best solution' for a lighter frame. In fact, we have done what often happens in the search for solutions. We have refined the problem and demonstrated our need to know more technical background, especially on the behaviour of loaded structures.
6 A problem with sensors
The problem we will look at in this section concerns the analysis of the design of a component used in cars that are fitted with airbags. The airbag has to be inflated rapidly when an electronic circuit in the system decides that a serious collision is taking place. The crucial component in the electronics is the accelerometer, which therefore has to be extremely reliable. Motor manufacturers have turned to a technology called MEMS (micro-electromechanical systems) for these accelerometers, because it enables large numbers of devices to be made at low cost, but with fantastically high reliability. The sensors are made on silicon chips, using the same manufacturing methods and equipment as electronic chips, the difference being that the results are mechanical structures rather than transistor circuits. Figure 32 shows an example of such a sensor. Notice the scale of the device.

Most airbag accelerometers are of the type shown in Figure 32 . They consist of a silicon chip, into which the sensor and the sensing structure are fashioned. It is made entirely of silicon and is in two parts: the first is a lump (often called the proof mass or seismic mass) suspended by means of a spring formed at each end; and the second is a pair of fixed sensing electrodes that enable the electronics to detect the movement of the lump relative to the surrounding platform of silicon.
The way it works is like this: when the chip is subjected to an acceleration, the lump moves a little relative to the chip and the fixed structures on it, in the same way as your shopping might fall off the back seat of the car if you brake hard. The amount of movement depends on the size of the acceleration, the stiffness of the springs, and the mass of the lump. When the lump is deflected, the electrical capacitance between it and the sensing structures on the chip changes, and this change is detected by the electronics, which converts it to a value for acceleration.
From the point of view of building prototypes and mock-up devices to test and refine the design, the trouble with MEMS is that the things you make are very small – too small to poke with a finger to see how they're working, and too small to measure directly how much they move when the acceleration is applied. You can't even build a scale model and make the measurements on that instead, because the material properties don't all scale up in the same way. Crucially for the accelerometer, the mass is proportional to the length-scale cubed (because mass is directly related to volume, not length), but the stiffness of the support springs would scale only in proportion to their length. Therefore, you would have to build your scale model out of a different material from the silicon of the real device if you wanted to mimic its behaviour on a magnified scale whilst maintaining the same ratio of mass to stiffness. A material with the right combination of properties probably doesn't exist.
You can go some of the way towards being sure that your design will work just by doing hand calculations. For instance, you would be able to calculate the stiffness of the springy support structure by using the appropriate formula for a beam of that type. This would enable you to estimate how far the mass would move under a given acceleration. Things get much more difficult if you want to predict how much it will bend if subjected to a sideways acceleration, because the manufacturing process demands that it has lots of holes in it. This makes the structure very complicated, and the standard equations for stiffness of uniform beams don't apply.
So, to test different designs of accelerometer, it looks as though you may have no choice but to make some for real. Unfortunately, the set-up costs for small runs of MEMS devices is very high (electronic chips are cheap only because millions of them are made at the same time).
The way out of this is to use finite element analysis (FEA) to check as many aspects of the device's behaviour as possible before spending money on building any.
FEA is most commonly used to find out what happens to a structure when a mechanical load is applied to it, but it has many more applications. It can be used to predict the temperature distribution in a central heating boiler, the blood flow patterns around an artificial heart valve, the acoustics of a loudspeaker, or the magnetic fields in an electric motor. In short, anything where there is an interaction between a field (e.g. temperature, magnetic, electrostatic, acoustic, flow, force) and an object.
FEA solves the difficult differential equations that are involved by breaking the problem up into many smaller, but related problems. A computer is used to solve a huge number of Box 11 Simultaneous equations , and the solution to the whole problem is presented as a visual display in two or three dimensions. Figure 33 shows a computer model of the accelerometer, ready for analysis by the FEA program.

Box 11 Simultaneous equations
I'm going to present a simple example of simultaneous equations, to illustrate why they crop up in FEA, and why we need computers to solve them even though the equations themselves may be quite straightforward. First, to remind you about simultaneous equations: they occur whenever you want to find the answer to a question where more than one condition has to be satisfied at the same time.
Cutting a piece of wood
A trivial example will get us started. Suppose you have a piece of wood 2.4 m long that you want to cut into two, with one piece four times the length of the other. This problem is so simple that you would do it in your head without realising that you had been solving simultaneous equations, but bear with me as I go in slow motion through the process, as it illustrates the general principle.
The two conditions that must be satisfied give rise to the two simultaneous equations that describe this problem. In ordinary language they are:
'The length of both pieces added together equals 2.4 m.' 'The length of one piece equals four times the length of the other piece.'
If you call the length of one piece x , and that of the other y , then:
By substituting the second equation for x into the first, we can rewrite the first equation like this:
and we quickly find that
Now that we know y , we can use either of our original equations to find that
Our results for x and y are in metres, of course.
A system of springs
We need to take this example a step further to give an insight into why we get simultaneous equations in FEA. If you reformulated the woodcutting problem in terms of springs and forces, you could say: 'I have two springs, but one is four times as stiff as the other. They are linked end to end, and the pair is anchored at one end ( Figure 34 ). I move the free end by a distance of 2.4 mm; how far has the point where the two springs are linked moved?

The force that has been applied to move the free end of the pair of springs is transmitted throughout the spring system, so we know that the force acting on each spring is the same. In a spring, the amount it extends and the force pulling it are related by the stiffness, through the expression F = kx , where F is the applied force, k is the stiffness, and x the extension.
We have said that the stiffness k 2 of one spring is four times that of the other, k 1 . We can write this as:
We have just said that the force experienced by each spring is the same, so we can also say that
where x is the extension of one spring, and y that of the other. We can get rid of the k terms by saying
This is the first of our simultaneous equations, and it says 'the amount the first spring stretches is four times as much as the second spring'.
The other equation states that the extension of both springs added together is 2.4 mm.
We needn't go through the maths because it is exactly the same as the wood-cutting example (except that our results will be in millimetres).
The point between the two springs and the end where the force is applied are effectively nodes in a simple finite element mesh. The springs are just representations of the stiffness of the material. What we have just solved is a small finite element problem. In a real problem, the numbers of calculations that need to be made are much bigger, and we may have 10 000 nodes and 30 000 simultaneous equations, which is why we use a computer. The calculations are generally rather more complex than in the spring example, because usually we are dealing with continuous materials, not 'lumps' like the springs, and there may also be non-linear behaviour.
If instead of two springs we had ten, each with a different stiffness, we could fairly comfortably still solve this by hand, to get the new positions of each node. But what if the springs extended in two or three dimensions, as in Figure 35 ?

The array of springs now resembles a mattress ( Figure 36 ). Imagine a weight were placed on it. You can see how this would now be very awkward to calculate, because the depression of the mattress would cause some of the springs representing the upper and lower fabric skins to change the direction in which they pull, according to how close they are to the weight. The awkwardness comes in the large number of interdependent calculations (simultaneous equations) and that is where a formal approach and the power of a computer are able to come to the rescue.

Returning to finite element analysis, the structure (in the case of the accelerometer, the mass and springs) is first divided up into a large number of small blocks, or elements . The size and shape of these elements can vary. They are made to be much smaller than any features of the structure near them. Usually, their form is tetrahedral or hexahedral (i.e. with four or six faces), but the essential properties they have are that they completely fill the volume of the structure, and that they are connected to their neighbours at their vertices. These elements are usually not regular shapes – they have to be distorted to fit the geometry of the structure being analysed, which could have any shape. Within reason, this distortion does not matter, provided that the elements are properly connected to their neighbours.
If enough elements are used, the continuously varying quantity that is to be determined (in our case the displacement) can be approximated into simpler variations within each element (for example, a linearly varying displacement across the element). According to their position in the structure, each element is assigned material properties. These properties are used to solve, for each element, what is happening within it. Because each node of each element is shared with neighbouring elements, the whole assembly of elements is linked, and the solution arrived at for each element is consistent with those arrived at for all its neighbouring elements.
The process of dividing the structure into these discrete elements is called meshing . The size of the elements in a mesh needs to be considered carefully: if the elements are too large relative to the structure, the result of the analysis will be inaccurate; if they are too small, the analysis may take far too long for the computer to execute. In modern FEA software packages, much of the routine and arduous work of meshing has been taken away, so that the meshes are generated automatically by the software, once the user has answered some questions such as what type of element they want to use.
But all we have done so far is divide the structure into elements and told the computer what they are made of. The program needs to be set going somehow, and this stage is known to FEA practitioners as 'setting the boundary conditions' . The computer needs to be told what other things are known about the problem. This is in a quite literal sense setting out what is happening at the boundaries or edges of the structure. In the case of the accelerometer, you would apply a direction and magnitude for an acceleration. Another boundary condition would be where the mass is attached to the silicon chip, and what sort of attachment this is. Is it fixed in position but free to rotate about one or more axes, or can it slide in one direction?
The deflection of a material, and the stress generated due to an applied load, are simply related to one another by the stiffness of the material. Therefore, solving the problem for deflection also provides the solution for stress. Figure 37 shows the results of running a finite element analysis of a MEMS accelerometer seismic mass subjected to a sideways acceleration. The colour shading shows where the stresses are concentrated.

One important thing to understand about FEA is that there are many opportunities to create a result that looks convincing, but is completely incorrect. Meshing is one such opportunity – usually where the mesh is too coarse to allow accurate calculation. This is most likely to happen near features in the structure, such as holes and corners, as in Figure 38 . This is why in a properly meshed structure the element size is smaller around such features than elsewhere.

It is good practice when doing FEA to run what is called a meshing analysis. This is where the same structure and boundary conditions are run with three or four different levels of mesh refinement, and the results are compared with one another. You can have reasonable faith in the quality of a mesh when the answers are very similar for two different levels of refinement of the mesh. But it is possible to go too far: if the elements get so small as to approach the size of the microstructure of the material (e.g. grains in a metal), then the implicit assumption in FE modelling – that the material is continuous – breaks down.
Another common source of error is incorrectly specified boundary conditions; for example, the wrong type of constraint at anchor points. In the accelerometer, the anchor points are where the springs are attached to the substrate. These should be defined as constraining motion in all three translations and all three rotations.
All this points to a need for independent verification of the results, and this often involves doing real tests on real structures. Ordinary hand calculation is useful too, because even if it doesn't give you accurate data, it is normally possible to get an estimate within a factor of two or three of the right answer, and this allows you to spot really gross errors in the FEA results. The FEA software companies also provide large numbers of worked examples of standard problems to allow you to check that your model behaves correctly.
To sum up these thoughts on the shortcomings of FE analysis, we can say that what we are working with is only a model, and models by their nature are never exactly like the real thing. The skill of the engineer lies in knowing how far the model can be stretched and how deeply probed, and yet still yield information about the real world.
Where does FEA fit into the problem-solving map in Figure 7 ?
FEA is a sort of mathematical model. It is important in the evaluation of possible solutions. It can also be used to test a demonstrator before building it.
7 Responsible engineering
7.1 the engineer and society.
Section 2 outlined some of the needs for engineering. Society relies on engineers to create solutions to the problems involved in meeting those needs.
This is a good time to pause and point out that inevitably, in return for all this fun and power, engineers have a responsibility to society. The people who employ our services, directly or indirectly, have to have an assurance that we are working within certain social, safety and ethical boundaries. Particularly given the increasing trend in the Western world towards litigation, it is in our own best interest to uphold this responsibility.
In considering the responsibilities of engineers, this section also provides an opportunity for putting the whole course in context.
7.2 The professional engineer
It has been suggested that there are four main criteria that identify a profession:
Custody of a clearly definable and valuable body of knowledge and understanding associated with a long period of training. A strong unitary organization which ensures that the profession generally speaks with 'one voice'. Clearly defined and rigorous entry standards, backed up by a requirement to register with the professional association. An overriding responsibility to maintain the standards of the profession for the public's benefit. Collins, Ghey and Mills (1989)
It is the role of the professional engineering bodies (Institutes, Institutions and Societies) to ensure that there is a focal point, and to coordinate the profession. A key issue within this role for a professional body is the support of the continuing professional development (CPD) of its members. This is vital for keeping pace and ensuring safety in a world where new technologies are developing daily. As a contribution to that process this course is aimed at extending your knowledge and awareness over a broad range of engineering activities.
7.3 Ethics and safety
A practising engineer makes ethical decisions, with moral and physical implications of varying magnitudes, on a daily basis. Examples of ethical dilemmas are limitless, ranging from the engineer who takes home the odd pen, file or discarded paper 'for the children', to the engineer who signs off a project without checking the details and identifying a simple arithmetic error of magnitude. The implications of either may be negligible – such as where the cost is more than compensated in unpaid overtime, the error merely accidentally increases the factor of safety – or catastrophic, such as when a discarded piece of paper has sensitive industrial information that ends up with a major competitor, or an arithmetic error decreases the factor of safety and a component fails in use at the cost of human life. For the occasions when the ramifications of our decisions are not apparent to anyone else, then ethics are a matter of personal conscience. However, when the ripples of our actions spread out and cause damage or injury then we are legally responsible for the result. Very often, the difference between the two is a matter of luck.
The very nature of engineering implies that safety must be a primary issue. Even the most remote of robots will have some human interface somewhere along the line, and most engineering design, whether industrial or domestic, requires direct contact at one or more levels. Ethics and safety are often closely interwoven – our responsibility for safety in design is as much moral as it is professional – and there are safety practices to be observed at every stage of the design process.
Much of what we know now has been learned from bitter experience but, amazingly, evidence suggests that we are still inclined to become complacent over long periods of technological triumph, leading us to more narrow margins of safety and, ultimately, repeated disaster. Consider what you know of the most publicised engineering disasters over the last century, and how safety was compromised in each case. Often, these great catastrophes are the result of some very minor error, and not the technological billion-to-one misfortune we might hope to believe – see Table 6 .
| Date | Disaster | Fundamental cause |
|---|---|---|
| 2000 | Concorde: fire and crash, shortly after take-off (113 dead) | Debris on runway and fuel tank susceptible to damage from same |
| 1986 | Chernobyl: meltdown of nuclear reactor core, and large-scale radioactive contamination | Safety procedures ignored, and design flaws |
| 1986 | Challenger Space Shuttle: exploded 73 seconds into flight (7 dead) | Design flaw in O-ring seals on the booster engines |
| 1981 | Hyatt Regency Hotel: suspended catwalk collapsed over a dance floor (114 dead) | Design change and failure to anticipate overload |
| 1979 | Three Mile Island: 51 per cent meltdown of nuclear reactor core | Incorrect procedures |
| 1940 | Tacoma Narrows Bridge: bridge collapsed | Unexpected wind-induced vibrations |
The study summarised in Table 7 investigated 800 cases (and millions of pounds worth) of structural failure, in which 504 people died and 592 were injured. When engineers were to blame, the study categorised the causes of failure (and hence breaches in safety).
| Insufficient knowledge | 68% |
|---|---|
| Underestimation of influence | 16% |
| Ignorance, carelessness or negligence | 14% |
| Forgetfulness, error | 13% |
| Relying on others without sufficient control | 9% |
| Objectively unknown situation | 7% |
| Imprecise definition of responsibilities | 1% |
| Choice of bad quality | 1% |
| Other | 3% |
*Note that the percentages add up to more than 100 – some failures were attributed to more than one cause.
You can see that in a whopping 68 per cent of cases, 'insufficient knowledge' on the part of the engineers was a contributing factor. Again, this has to be an ethics issue – can we really accept that all these engineers were so lacking in self-awareness that they truly believed in their own abilities, or were some of them just not brave enough to admit they were out of their depth at the time? The lesson is clear. You don't need to store everything you study in a photographic memory compartment, but it is essential to remember that, as a professional engineer, you are accountable for your actions; and this includes recognising when you need to bring in expertise from a colleague or external sources.
7.4 The impact of technology on society
Engineering is apparently driven by the needs of society. The technology that results, in turn, drives other changes in our everyday lives. One of the basic needs identified in Section 2 was for shelter. There are many fine examples of long-surviving structures such as pyramids, aqueducts, bridges, walls, functional buildings, and so on. Remarkably these constructions were completed without the depth of analysis and understanding that is available today (though we don't necessarily know much of the failures). The challenge to be more efficient in terms of space, materials, cost of ownership, etc. gets harder every year. Understanding the properties of static structures is important in creating tomorrow's solutions.
We have seen how a solution falls into one of three categories (innovation by context, innovation by development, and routine solution) according to the need that drives it. Furthermore, the need is shown to be the point of reference that should be kept in sight throughout the process of finding solutions. Unless the need is accurately stated, the ideal solution cannot be obtained – a case of 'garbage in, garbage out'.
We have examined the process of finding a solution step by step, using examples to help us see where and why particular approaches are most appropriate at various stages, such as for instance the best kind of modelling to use. Sometimes it is enough to make some rough calculations by hand in a few minutes, but at other times this is not sufficiently accurate. So at the other extreme, a physical mock-up or computer-aided modelling technique such as finite element analysis may be needed to provide the necessary data.
The bicycle design example enabled us to explore the idea that a solution is always a compromise, but that the best compromise can be found by the use of quantitative tools such as merit indices.
We saw that the solution-finding process generally contains loops, where certain steps are repeated until an acceptable result is obtained. The important point to note about this is that a trip round one of these loops (so long as it's not the loop that leads back from the very end of the process to the very beginning!) is not a failure, but a means of refining the solution.
Finally, we looked at the engineer in the context of wider society and saw that engineering has been central in providing the high quality of life enjoyed by many. The other side of this picture is that a significant proportion of the spectacular disasters we have witnessed involving failure of components have been attributable to poor work on the part of engineers. This lays a heavy responsibility on our shoulders to make sure we know what we're doing.
Lesson Problem Solving
Grade Level: 8 (6-8)
(two 40-minute class periods)
Lesson Dependency: The Energy Problem
Subject Areas: Physical Science, Science and Technology

- Print lesson and its associated curriculum
Curriculum in this Unit Units serve as guides to a particular content or subject area. Nested under units are lessons (in purple) and hands-on activities (in blue). Note that not all lessons and activities will exist under a unit, and instead may exist as "standalone" curriculum.
- Energy Forms and States Demonstrations
- Energy Conversions
- Watt Meters to Measure Energy Consumption
- Household Energy Audit
- Light vs. Heat Bulbs
- Efficiency of an Electromechanical System
- Efficiency of a Water Heating System
- Solving Energy Problems
- Energy Projects
| Unit | Lesson | Activity |
TE Newsletter
Engineering connection, learning objectives, worksheets and attachments, more curriculum like this, introduction/motivation, associated activities, user comments & tips.

Scientists, engineers and ordinary people use problem solving each day to work out solutions to various problems. Using a systematic and iterative procedure to solve a problem is efficient and provides a logical flow of knowledge and progress.
- Students demonstrate an understanding of the Technological Method of Problem Solving.
- Students are able to apply the Technological Method of Problem Solving to a real-life problem.
Educational Standards Each TeachEngineering lesson or activity is correlated to one or more K-12 science, technology, engineering or math (STEM) educational standards. All 100,000+ K-12 STEM standards covered in TeachEngineering are collected, maintained and packaged by the Achievement Standards Network (ASN) , a project of D2L (www.achievementstandards.org). In the ASN, standards are hierarchically structured: first by source; e.g. , by state; within source by type; e.g. , science or mathematics; within type by subtype, then by grade, etc .
Ngss: next generation science standards - science.
View aligned curriculum
Do you agree with this alignment? Thanks for your feedback!
International Technology and Engineering Educators Association - Technology
State standards, national science education standards - science.
Scientists, engineers, and ordinary people use problem solving each day to work out solutions to various problems. Using a systematic and iterative procedure to solve a problem is efficient and provides a logical flow of knowledge and progress.
In this unit, we use what is called "The Technological Method of Problem Solving." This is a seven-step procedure that is highly iterative—you may go back and forth among the listed steps, and may not always follow them in order. Remember that in most engineering projects, more than one good answer exists. The goal is to get to the best solution for a given problem. Following the lesson conduct the associated activities Egg Drop and Solving Energy Problems for students to employ problem solving methods and techniques.
Lesson Background and Concepts for Teachers
The overall concept that is important in this lesson is: Using a standard method or procedure to solve problems makes the process easier and more effective.
 Describe the problem, 2) describe the results you want, 3) gather information, 4) think of solutions, 5) choose the best solution, 6) implement the solution, 7) evaluate results and make necessary changes. Reenter the design spiral at any step to revise as necessary.")
The specific process of problem solving used in this unit was adapted from an eighth-grade technology textbook written for New York State standard technology curriculum. The process is shown in Figure 1, with details included below. The spiral shape shows that this is an iterative, not linear, process. The process can skip ahead (for example, build a model early in the process to test a proof of concept) and go backwards (learn more about the problem or potential solutions if early ideas do not work well).
This process provides a reference that can be reiterated throughout the unit as students learn new material or ideas that are relevant to the completion of their unit projects.
Brainstorming about what we know about a problem or project and what we need to find out to move forward in a project is often a good starting point when faced with a new problem. This type of questioning provides a basis and relevance that is useful in other energy science and technology units. In this unit, the general problem that is addressed is the fact that Americans use a lot of energy, with the consequences that we have a dwindling supply of fossil fuels, and we are emitting a lot of carbon dioxide and other air pollutants. The specific project that students are assigned to address is an aspect of this problem that requires them to identify an action they can take in their own live to reduce their overall energy (or fossil fuel) consumption.
The Seven Steps of Problem Solving
1. Identify the problem
Clearly state the problem. (Short, sweet and to the point. This is the "big picture" problem, not the specific project you have been assigned.)
2. Establish what you want to achieve
- Completion of a specific project that will help to solve the overall problem.
- In one sentence answer the following question: How will I know I've completed this project?
- List criteria and constraints: Criteria are things you want the solution to have. Constraints are limitations, sometimes called specifications, or restrictions that should be part of the solution. They could be the type of materials, the size or weight the solution must meet, the specific tools or machines you have available, time you have to complete the task and cost of construction or materials.
3. Gather information and research
- Research is sometimes needed both to better understand the problem itself as well as possible solutions.
- Don't reinvent the wheel – looking at other solutions can lead to better solutions.
- Use past experiences.
4. Brainstorm possible solutions
List and/or sketch (as appropriate) as many solutions as you can think of.
5. Choose the best solution
Evaluate solution by: 1) Comparing possible solution against constraints and criteria 2) Making trade-offs to identify "best."
6. Implement the solution
- Develop plans that include (as required): drawings with measurements, details of construction, construction procedure.
- Define tasks and resources necessary for implementation.
- Implement actual plan as appropriate for your particular project.
7. Test and evaluate the solution
- Compare the solution against the criteria and constraints.
- Define how you might modify the solution for different or better results.
- Egg Drop - Use this demonstration or activity to introduce and use the problem solving method. Encourages creative design.
- Solving Energy Problems - Unit project is assigned and students begin with problem solving techniques to begin to address project. Mostly they learn that they do not know enough yet to solve the problem.
- Energy Projects - Students use what they learned about energy systems to create a project related to identifying and carrying out a personal change to reduce energy consumption.
The results of the problem solving activity provide a basis for the entire semester project. Collect and review the worksheets to make sure that students are started on the right track.

Learn the basics of the analysis of forces engineers perform at the truss joints to calculate the strength of a truss bridge known as the “method of joints.” Find the tensions and compressions to solve systems of linear equations where the size depends on the number of elements and nodes in the trus...

Through role playing and problem solving, this lesson sets the stage for a friendly competition between groups to design and build a shielding device to protect humans traveling in space. The instructor asks students—how might we design radiation shielding for space travel?

A process for technical problem solving is introduced and applied to a fun demonstration. Given the success with the demo, the iterative nature of the process can be illustrated.

The culminating energy project is introduced and the technical problem solving process is applied to get students started on the project. By the end of the class, students should have a good perspective on what they have already learned and what they still need to learn to complete the project.

Hacker, M, Barden B., Living with Technology , 2nd edition. Albany NY: Delmar Publishers, 1993.
Other Related Information
This lesson was originally published by the Clarkson University K-12 Project Based Learning Partnership Program and may be accessed at http://internal.clarkson.edu/highschool/k12/project/energysystems.html.
Contributors
Supporting program, acknowledgements.
This lesson was developed under National Science Foundation grants no. DUE 0428127 and DGE 0338216. However, these contents do not necessarily represent the policies of the National Science Foundation, and you should not assume endorsement by the federal government.
Last modified: August 16, 2023
- Business Essentials
- Leadership & Management
- Credential of Leadership, Impact, and Management in Business (CLIMB)
- Entrepreneurship & Innovation
- Digital Transformation
- Finance & Accounting
- Business in Society
- For Organizations
- Support Portal
- Media Coverage
- Founding Donors
- Leadership Team

- Harvard Business School →
- HBS Online →
- Business Insights →
Business Insights
Harvard Business School Online's Business Insights Blog provides the career insights you need to achieve your goals and gain confidence in your business skills.
- Career Development
- Communication
- Decision-Making
- Earning Your MBA
- Negotiation
- News & Events
- Productivity
- Staff Spotlight
- Student Profiles
- Work-Life Balance
- AI Essentials for Business
- Alternative Investments
- Business Analytics
- Business Strategy
- Business and Climate Change
- Creating Brand Value
- Design Thinking and Innovation
- Digital Marketing Strategy
- Disruptive Strategy
- Economics for Managers
- Entrepreneurship Essentials
- Financial Accounting
- Global Business
- Launching Tech Ventures
- Leadership Principles
- Leadership, Ethics, and Corporate Accountability
- Leading Change and Organizational Renewal
- Leading with Finance
- Management Essentials
- Negotiation Mastery
- Organizational Leadership
- Power and Influence for Positive Impact
- Strategy Execution
- Sustainable Business Strategy
- Sustainable Investing
- Winning with Digital Platforms
7 Engineering Challenges Design Thinking Can Help Solve

- 19 Jan 2023
Several challenges face the engineering industry. Addressing them requires innovative solutions and structured processes, such as design thinking.
If you’re an engineer who wants to develop business skills , here's an overview of design thinking and seven engineering challenges it can help solve.
What Is Design Thinking?
Design thinking is one of the most effective approaches to problem-solving. It’s a solutions-based methodology focused on human-centered design and observing problems with empathy.
In the online course Design Thinking and Innovation , Harvard Business School Dean Srikant Datar structures the process using a four-stage framework. The stages are:

In the clarification stage, you observe a situation or challenge without bias and frame your findings in the form of a problem statement.
“Before you begin to generate innovative solutions for your own design problem, you must always think hard about how you’re going to frame that problem,” Datar says in the course.
Reframing the problem as a question is an excellent way to do this. For example, using "how might we" instead of "the problem is" can encourage empathy in the design process and shift your mindset toward potential solutions.
These questions are particularly important when considering empathetic design. According to the Harvard Business Review , engineers who put themselves in their audience's shoes while designing often develop innovative products . By understanding your audience’s unexpressed needs, you can effectively leverage your technical knowledge to create innovative solutions to previously unknown problems.
Once you've made your observations, you can explore potential solutions. The ideate stage is for divergent thinking—the process of exploring as many ideas as possible. It involves:
- Finding and categorizing similarities in users' pain points
- Considering the resources available to you and how you can use them to solve a problem
- Brainstorming potential solutions
Creativity and an open mind are vital at this stage. As you explore ideas, they can highlight other problems you were unaware of.
The development stage focuses on turning your ideas into workable prototypes. For ideas to be innovative, they must be both new and useful ; many, though creative, aren't feasible.
"As you prototype concepts in phase three, you may discover results that force you to return to phases one and two to reframe your question," Datar says in Design Thinking and Innovation .
This iteration can occur in any of the four stages because each involves a different level of exploration that highlights new problems, questions, or solutions. This isn't cause for discouragement.
"Do not think of this as a setback,” Datar says in the course. “Iterating on solutions is a normal and expected result of design thinking.”
Design thinking’s ultimate objective is finding effective, workable solutions. The implementation phase involves finalizing developments and communicating their value to stakeholders.
This final stage can be challenging for many engineers. Since their work is so technical, it’s sometimes difficult for stakeholders to understand their impact on the organization. As a result, engineers should develop effective communication skills to ensure their ideas are implemented.
The Importance of Design Thinking in Engineering
Design thinking is a valuable skill for engineers to learn for several reasons. For one, engineering positions are among the most common occupations requiring design thinking skills .
Since engineers are often responsible for solving complex problems, it’s easy to get lost in the details and set creative problem-solving skills aside. Creativity in business is beneficial because it:
- Encourages innovation
- Boosts productivity
- Allows for adaptability
- Fosters growth

Leveraging design thinking skills to pursue innovation not only helps professionals find creative solutions but identify business opportunities , evaluate market needs , and design new products and services.
Engineers’ responsibilities can vary. Whether creating new products or maintaining existing ones, engineering revolves around design . For this reason, a systematic approach is highly valuable when encountering industry challenges.
7 Engineering Challenges Design Thinking Can Solve
Some of the challenges engineers often face include:
- Identifying obscure problems
- Overcoming cognitive fixedness
- Designing sustainable innovations
- Addressing the skilled labor shortage
- Encouraging diversity
- Keeping up with advancing technology
- Overcoming status-quo bias
Here’s an overview of how design thinking can help solve these problems.
1. Identifying Obscure Problems
Engineers often encounter problems that are difficult to identify. As a result, it can be easy for them to jump to conclusions based on preexisting knowledge of a design or situation. Datar discourages this in Design Thinking and Innovation .
"Whenever you have a difficult problem, you tend to solve the fringes of it,” Datar says. “But try and go for the most important part that you need to solve."
For example, if you're trying to remove a major obstacle preventing a project’s completion, you might be tempted to search for a cause equal in scope to its impact. However, some of the biggest design problems can be caused by something as simple as a misplaced hyphen or a loose screw. Often, the best approach is to consider the bigger picture. Is there anything in the design you don't understand?
The clarification stage in the design thinking framework encourages you to obtain insights through unbiased observation. An effective tool to accomplish this is journey mapping , which involves creating a chronological visual timeline of everything you know about a problem.
According to Design Thinking and Innovation , the three steps to developing a journey map are:
- Creating observations about the user's journey
- Writing those observations on a timeline
- Organizing the observations into different stages
Creating a timeline of events can help identify when a problem occurs, as well as what precedes and follows it. This can enable you to narrow down its cause.
2. Overcoming Cognitive Fixedness
Cognitive fixedness is a mindset that assumes there's just one way to accomplish tasks. It considers every situation through the lens of past decisions. Thinking "if it worked in the past, it'll work now" is easy to follow, especially in the engineering industry, where replicating past successes is often the best way to proceed.
For example, while new technology trends can succeed in the market because of their innovative features, incorporating those features into an existing design might not be feasible—and even prevent you from meeting critical deadlines. Furthermore, in areas with high risk to human life—such as submarine design—it may be advisable to incorporate technology that’s proven effective before creating something new.
While caution is important, cognitive fixedness can prevent innovation, resulting in obsolescence. You must strike a balance between the operational and the innovation worlds.
The difference between the two worlds is described in Design Thinking and Innovation :
- The operational world represents a business’s routine procedures.
- The innovation world facilitates open-endedly exploring ideas.
Although the operational world is important, it can result in cognitive fixedness and prevent ideas’ progression. If you're struggling to overcome cognitive fixedness—whether your own or someone else's—consider why there's an unwillingness to change to determine the next steps.
3. Designing Sustainable Innovations
Climate change is a pressing issue impacting businesses around the globe . An increasing number of organizational leaders are addressing it by focusing on the triple bottom line . According to the HBS Online course Sustainable Business Strategy , the triple bottom line considers:
- Profit: Satisfying shareholders and producing a profit
- People: Impacting society in a positive, measurable way
- The planet: Making a positive impact on the environment
By reframing problems and pursuing workable solutions that don't sacrifice profit, you can effectively incorporate sustainability into business strategies .

4. Addressing the Skilled Labor Shortage
The United States is experiencing a shortage of engineers , which has put a strain on employers hoping to hire qualified candidates in a shrinking market.
Consider how you'd approach this challenge from a design thinking perspective. Clarifying the problem might highlight opportunities you didn't previously think of. For instance, companies such as Google and Microsoft have invested in science, technology, engineering, and math (STEM) education , enabling more people to pursue careers in those industries.
Other companies have sought ways to attract engineering talent. It can be easy to draw candidates by raising salaries or increasing benefits, but many engineers aren't comfortable working for organizations that harm the environment. Your firm should consider adopting a sustainable business strategy that could benefit the planet and attract qualified applicants.
5. Encouraging Diversity
Engineering has historically been a male-dominated field. One of the primary causes of this imbalance is the workplace stereotype that STEM careers are masculine. This has resulted in implicit—and often direct—discouragement of women from pursuing STEM careers.
In the context of design thinking, clarifying and reframing the problem might result in questions like, "How can we empower more women to pursue STEM careers?"
Through exploring potential solutions, you may discover that encouraging and empowering a diverse population to pursue engineering can help address other challenges, such as the skilled labor shortage.
6. Keeping Up with Advancing Technology
Technology is continuously advancing; companies that fail to adapt might get left behind. For example, Blackberry was once one of the fastest-growing smartphone companies in the world. Yet, its products became obsolete when the company refused to adopt touch-screen technology. This resulted in Blackberry losing 90 percent of its market share between 2009 and 2013.
Design thinking encourages continual awareness to avoid these downward trends. Learning how to recognize opportunities and communicate them to others can prevent a business from falling behind.
7. Overcoming Status-Quo Bias
Resistance to change doesn't just occur within an organization—it happens among customers, too. This is known as status-quo bias , which is a challenge you must address during implementation.
The challenge is how to retain existing customers while appealing to the current market and acquiring new ones. Avoid assuming users will understand a design change you’ve implemented just because it makes sense to you.
According to Datar in Design Thinking and Innovation , you should consider three views during the implementation phase:
- The developer's view: The designer with knowledge and understanding of a design's utility and benefits
- The neutral view: Someone who doesn't have a preexisting opinion about the design
- Stakeholders' view: Existing customers and users who have existing opinions based on the status quo
Learning how to overcome status-quo bias is critical to successful innovation.

Improving Your Design Thinking Skills
Whether encountering one of the engineering challenges mentioned above or something more niche, design thinking can be a valuable tool for solving them.
Learning about the process and its business applications can enable you to climb the corporate ladder and make an impact on your organization.
Ready to learn the tools you need to innovate? Enroll in our online certificate course Design Thinking and Innovation —one of our entrepreneurship and innovation courses —and develop in-demand skills that can benefit your engineering career. If you aren’t sure which HBS Online course is right for you, download our free flowchart to explore your options.

About the Author
Gostinica Kajut Kompania

Services & Amenities

Standard TWIN(with shared bathroom)
SGL (with shared bathroom)
Standard double
Standard triple
Property policies.
Front desk hours: 24/7
Frequently Asked Questions
How do i book a hotel on trip.com, how to get hotel deals on trip.com, where can i find hotel deals on trip.com, how to get lower prices for hotels, how many hotels are listed on trip.com, can i cancel or change my hotel bookings on trip.com, how do i contact trip.com's customer support, recommendations, explore more.
Metaheuristics for Solving Global and Engineering Optimization Problems: Review, Applications, Open Issues and Challenges
- Review article
- Open access
- Published: 21 August 2024
Cite this article
You have full access to this open access article

- Essam H. Houssein ORCID: orcid.org/0000-0002-8127-7233 1 ,
- Mahmoud Khalaf Saeed 1 ,
- Gang Hu 2 , 3 &
- Mustafa M. Al-Sayed 1
98 Accesses
Explore all metrics
The greatest and fastest advances in the computing world today require researchers to develop new problem-solving techniques capable of providing an optimal global solution considering a set of aspects and restrictions. Due to the superiority of the metaheuristic Algorithms (MAs) in solving different classes of problems and providing promising results, MAs need to be studied. Numerous studies of MAs algorithms in different fields exist, but in this study, a comprehensive review of MAs, its nature, types, applications, and open issues are introduced in detail. Specifically, we introduce the metaheuristics' advantages over other techniques. To obtain an entire view about MAs, different classifications based on different aspects (i.e., inspiration source, number of search agents, the updating mechanisms followed by search agents in updating their positions, and the number of primary parameters of the algorithms) are presented in detail, along with the optimization problems including both structure and different types. The application area occupies a lot of research, so in this study, the most widely used applications of MAs are presented. Finally, a great effort of this research is directed to discuss the different open issues and challenges of MAs, which help upcoming researchers to know the future directions of this active field. Overall, this study helps existing researchers understand the basic information of the metaheuristic field in addition to directing newcomers to the active areas and problems that need to be addressed in the future.
Similar content being viewed by others

Recent Advances and Application of Metaheuristic Algorithms: A Survey (2014–2020)

An exhaustive review of the metaheuristic algorithms for search and optimization: taxonomy, applications, and open challenges

A Review on Metaheuristic Approaches for Optimization Problems
Explore related subjects.
- Artificial Intelligence
Avoid common mistakes on your manuscript.
1 Introduction
As the world moves towards competition in all fields, people need to best use the limited resources to score a better result and thus achieve a better place in the competition. In this context, optimization is strongly needed. Optimization is a process of picking up the optimal values of the optimization problem's parameters from a given set of values to achieve the desired output, which specifically means output minimization or maximization. In other words, we need to obtain the best optimal solution under a set of limitations and constraints by tuning the parameters of the problem to be addressed. As mentioned in [ 1 ], the optimization process includes a set of steps which starts with formulating the problem to be in the form of an optimization problem, constructing the objectives (cost or fitness) function, determining the decision variables and the restrictions on these variables, then simplifying the reality of the problem by generating the mathematical model that represents the problem. Finally, the problem solver seeks to generate the most acceptable solution by maximizing or minimizing the value of the objective function.
Stochastic optimization algorithms are the most promising type under the umbrella of optimization, which can be classified as heuristic Algorithms (HAs) and metaheuristic Algorithms (MAs). In simple words, stochastic optimization is the general class of algorithms that depends on the random nature in the process of getting the optimal or near-optimal solution. HAs are iterative algorithms, iterating many times seeking a better solution than the solution obtained previously. HAs are used to find a feasible and reasonable solution but may not be the optimal one. In addition, HAs do not provide any evidence of the optimality of the solution obtained. A set of issues can be found in HAs, such as being problem-dependent algorithms specifically designed for a particular problem [ 2 ]. Another challenge in HAs is immeasurable success as there is no information about how close the obtained solution is to the optimal. Finally, there is a dilemma in measuring the computational time. Disclosing these gaffes and achieving a trade-off between solution quality and computational time is a main purpose of the appearance of metaheuristics [ 3 ]. As it is used to solve different types of problems, metaheuristics are the most preferable type of these algorithms. Metaheuristics were introduced for the first time by Glover in [ 4 ].
1.1 Understanding Optimization: What and Why?
In this section, we will help researchers understand the fascinating world of optimization. First, we will present examples of what optimization is, then we will try to answer the question, "Why do we study optimization?" Finally, this section will clarify how to optimize anything you have.
What is Optimization? In simple words, optimization is the art of perfectionism—how to perfectly make something in the best way. Optimization answers the question: how to obtain the best solution for a problem while applying a set of limitations? Maximizing profit, minimizing mass, pollution minimization, noise reduction, and drag reduction are all practical examples that can be achieved by using optimization. In most cases, optimization helps in the design process as a replacement for the traditional approach, which depends mainly on trials or humans. To clarify the simplicity and practical power of optimization in the design process, a diagrammatic view of how optimization methods help in the design process is presented in Fig. 1 .

The optimization methods as a replacement of traditional method in the design process
Why Optimization? People may ask why we study optimization. In most cases, we do not have the opportunity to physically perform trials; instead, we use optimization to simulate a solution for a specific problem to see what the result of this trial would be. Hence, we can decide whether this trial is applicable or not. People may benefit from applying optimization in the industry to achieve a better position in competition under limited resources.
1.2 Paper Structure
The rest of this paper is structured as follows: various metaheuristic taxonomies and the development process are illustrated in Sects. 2 and 3 . Taxonomies of optimization problems based on many criteria and their performance assessment are introduced in Sects. 4 and 5 . The applications of metaheuristic algorithms (MAs) in different fields are presented in Sect. 6 . The open issues and challenges of MAs and the observations from the experiment are introduced in Sect. 7 . Finally, the research review is concluded in Sect. 8 . The outline of the article is illustrated in Fig. 2 .

The outline of the article
2 Metaheuristics Optimization Algorithms Taxonomies
Due to the rapid growth of the optimization field, many metaheuristic (MA) algorithms have been proposed recently. These algorithms need to be classified according to four main taxonomies: inspiration source, number of search agents, the mechanisms followed in the optimization process, and solution updating, in addition to the number of parameters included in the algorithm. In this section, these new algorithms will be classified.
2.1 Taxonomy According to the Inspiration Source
This is the most familiar and oldest classification of metaheuristic algorithms (MAs) and is suitable for studying the subcategory of MAs, which are nature-inspired metaheuristic algorithms. In general, by including the source of inspiration in the calculation, different studies use different classifications according to the inspiration, as illustrated in Table 1 . In this study, Fig. 3 shows a more comprehensive taxonomy for MAs.

The proposed classification of MAs based on the source of inspiration
As follows, the subcategories of the source of inspiration for MAs shown in Fig. 3 are illustrated in detail.
Swarm Intelligence (SI) is a self-organized system of collaborative behavior. SI has a set of characteristics, such as good communication skills between individuals, the ability to share information among its individuals, and the ability to learn from doing (adaptable beings). On the other hand, organisms do not have the ability to defend themselves against predators; they need to be in a swarm to perform the search or attack process for food. Mimicking the behavior of beings that live in flocks or herds seeking to hunt for prey or find food is the main inspiration for SI algorithms [ 8 ]. One of the most famous algorithms in this category is Particle Swarm Optimization (PSO) [ 9 ], which is inspired by mimicking the intelligent behavior of a flock of birds. Monkey Search Optimization (MSO) [ 10 ] is another example of SI algorithms that simulate the tree climbing process during the food discovery process. Hunting strategy and hierarchy-based leadership are the inspiration for Grey Wolf Optimizer (GWO) [ 11 ], Ant Colony Optimization (ACO) [ 12 ], Cuckoo Search (CS) [ 13 ], Ant Lion Optimizer (ALO) [ 14 ], and Honey Badger Algorithm (HBA) [ 15 ], which are well-known instances of SI algorithms.
Evolutionary Algorithms (EA) simulate the behavior of evolution, including recombination, mutation, crossover, and selection. EA begins by generating a random population; this population is then evaluated to choose the most fit individuals to contribute to the next generation. After several iterations, the population evolves to find the optimal solution. Genetic Algorithm (GA) [ 16 ] is the oldest algorithm in this class, mimicking Charles Darwin's theory of natural evolution. Other well-known EA methods include Differential Evolution (DE) [ 17 ], Genetic Programming (GP) [ 18 ], Coronavirus Disease Optimization Algorithm (COVIDOA) [ 19 ], Liver Cancer Algorithm [ 20 ], and Red Deer Algorithm (RDA) [ 21 ].
Human-based Algorithms (HA) is the main inspiration for this category. Mimicking the learning process between teachers and students led to the introduction of Teaching Learning-Based Optimization (TLBO) [ 22 ]. Tabu Search (TS) [ 23 ] enhances the search process through long and short memory. Other well-known HA algorithms include Group Leader Optimization Algorithm (GLO) [ 24 ], Stock Exchange Trading Optimization (SETO) [ 25 ], and Social Emotional Optimization Algorithm (SEOA) [ 26 ].
Physics-based Algorithms (PhA) are inspired by the physical laws or simulating a physical phenomenon such as gravitation, Big Bang, black hole, galaxy, and field. In other words, the physical rules are used in the process of generating new solutions. The most popular instances of this class are the Gravitational Search Algorithm (GSA) [ 27 ], Big Bang Big Chain (BBBC) [ 28 ], Heat Transfer Search [ 29 ], Henry Gas Solubility Optimization (HGSO) [ 30 ], Archimedes Optimization Algorithm [ 31 ], and Light Spectrum Optimizer (LSO) [ 32 ], which are some of the most common algorithms in the PhA category.
Chemistry based algorithms (ChAs) are algorithms that concentrate on the principle of chemical reactions such as molecular reaction, Brownian motion, molecular radiation. A list of algorithms that fall into this category are Chemical Reaction Optimization (CRO) [ 33 ], Gases Brownian Motion Optimization (GBMO) [ 34 ], Artificial Chemical Process (ACP) [ 35 ], Ions Motion Optimization Algorithm (IMOA) [ 36 ], and Thermal Exchange Optimization (TEO) [ 37 ], are common instances of the ChA category.
Math-based algorithms (MathA) Math-based optimization algorithms are algorithms that can be inspired from the mathematical theorems, concept and rules. Some algorithms fall into this group including; Gaussian Swarm Optimization (GSO) [ 38 ], Sine Cosine Algorithm (SCA) [ 39 ], Lévy flight distribution [ 40 ], Exponential Distribution Optimizer (EDO) [ 41 ], and Golden Sine Algorithm (GSA) [ 42 ], are common instances of the MathA category.
Plant-based Algorithms (PlA) The PLAs is relays on the simulation of the intelligent behavior of the plants. Specifically, a set of concepts in plant nature is used to inspire new metaheuristic optimization algorithms such as the flower flow pollination process, the phenomenon of colonization of invasive weeds in nature, the ecology and weed biology. Some algorithms fall into this group including; Flower Pollination Algorithm (FPA) [ 43 ], Invasive Weed Optimization (IWO) [ 44 ], Paddy Field Algorithm (PFA) [ 45 ], Artificial Plant Optimization Algorithm (APOA) [ 46 ], Plant Growth Optimization (PGO) [ 47 ], Root Growth Algorithm (RGA) [ 48 ], Rooted Tree Optimization (RTO) [ 49 ] are common instances of the PlA category.
Sports and Game based Algorithms (SpGA) Depending in the information and rules applied in the sports and gaming, a set of optimization algorithms can be inspired from team game strategies used in football, Basketball, and volleyball, Ludo Game. Ludo Game-Based Swarm Intelligence (LGSI) [ 50 ], Team Game Algorithm (TGA) [ 51 ], Football game algorithm (FGA) [ 52 ], World Cup Optimization (WCO) [ 53 ], Soccer League Competition (SLC) algorithm [ 54 ], and League championship algorithm (LCA) [ 55 ] are common instances of SpGA algorithms.
Miscellaneous The rest of metaheuristics optimization algorithms can be collected to be belongs to the miscellaneous class, the purpose of using the term miscellaneous is the miscellaneous ideas such as politics, Artificial thoughts, atmosphere, trade and other topics. Work occurring in clouds such as cloud movement, spread, and creation is the basic idea behind the inspiration of the Atmosphere Cloud Model Optimization Algorithm (ACMO) [ 56 ], the exchange of information in the stock market occurs, and is the basic motivation behind the Exchange Market Algorithm (EMA) [ 57 ]. The Grenade Explosion Method (GEM) [ 58 ], Passing Vehicle Search (PVS) [ 59 ], Small World Optimization (SWO) [ 60 ], Yin-Yang Pair Optimization (YYPO) algorithm [ 61 ], Political Optimizer (PO) [ 62 ], and the Great Deluge Algorithm (GDA) [ 63 ] are other examples of this category.
2.2 Taxonomy According to the Number of Search Agents
The classification according to the source of inspiration is the most familiar and is usually introduced in studies to summarize the concept of classification. However, this classification is not enough to tackle the classification process, as it does not provide any information about the internal mathematical structure or programming ideas of the algorithms. Hence a new angle of classification is used. Meta-heuristics can be categorized based on the number of search agents seeking to find the optimal into two groups of single-solution-based MAs (SMAs), and population-based MAs (PMAs). The following two paragraphs provide more information about each group. Figure 4 is a clarification view of this taxonomy.

The classification of MAs based on the number of search agents
Single-solution based MAs (SMAs) SMAs is also called Trajectory‑based algorithms (TAs) as the algorithms in this class depends on single trajectory nature in its work. In other words, in each iteration, the solution is directed to a single trajectory. The optimization procedure (searching about the optimal solution) of SMAs is started with single solution (from one search agent), later, and in the subsequent iterations, the solution is refined with the aim of achieving the optimal solution. We can say that the algorithm generates a single path to the optimal solution over the course of the iteration. For SMAs, the Simulated Annealing (SA) [ 64 ] is one of the familiar algorithms. where a single search agent moves through the design or search space of the problem being tackled. Over the course of iteration, a better solution or moves is accepted to participate in determining the optimal solution while the weak movements and solution are more likely to participate in the optimization process. Applying these actions guarantee generating an optimal path through the search space with a great probability of achieving a global optimal solution. Hill climbing (HC) reviewed in [ 65 ], Tabu Search (TS) [ 23 ], Great Deluge Algorithm (GDA) [ 63 ], Iterated Local Search (ILS) [ 66 ], and Greedy Randomized Adaptive Search Procedures (GRASP) [ 67 ] are some instances of this class.
Population-based MAs (PMAs) In contrast, and taking advantage of sharing information among agents, Collaborative work and data remembering, the PMAs is introduced. First, we can say that more than one agent is superior to a single agent in achieving the optimal solution. Specifically, a great number of search agents work together to extensively explore the search space, so we can call PMAs explorative-based algorithms. The optimization procedure starts with employing a population of search agents positioned at many distinct positions in the search space, and over the course of iterations, the population uses the advantage of sharing information to better achieve the best global solution. In simple words, a set of lines is drawn in the search space to extensively search the search space in order to obtain the best optimal solution achieved by all search agents. One of the oldest and widely used algorithms in PMAs is the Genetic Algorithm (GA), Chemical reaction optimization (CRO), Particle Swarm Optimization (PSO), Archimedes Optimization Algorithm (AOA), Sine Cosine Algorithm (SCA), Exponential Distribution Optimizer (EDO), Grey Wolf Optimizer (GWO), Ant Colony Optimization (ACO) and Honey Badger Algorithm (HBA) are some instances from this category.
In general, no class is totally better than the other where PMAs escape from the local optima dilemma in contrast to SMAs, also SMAs consume less computational time than PMAs, for a Itr number of iterations, the SMAs perform a lower number of objective function evaluation which equals 1 × Itr while the PMAs perform N × Itr evaluation of the objective function. N here stands for the number of search agents employed by the algorithm to obtain the optimal solution. But overall, the scientists prefer to use the PMAs as it has a greater probability of achieving global optimal solution in a considerable amount of time.
2.3 Taxonomy According to Updating Mechanisms
However, the classification according to the number of search agents provides information about the internal structure of the algorithm, but it cannot be treated as a uniform classification due to the few algorithms belonging to one group while the remainder (majority) falls under the other group. In this context, we need to provide a different classification angle to achieve an acceptable degree of uniform classification. According to the most important step of any algorithm, which is the solution update process. From this prospective MAs can be classified as solution creation-based algorithms (SCBAs) and differential vector movement-based algorithms (DVMs) [ 68 ]. In the following paragraph, we introduce a simple classification based on the behavior of the algorithms. Figure 5 is a clarification view of this taxonomy.

The classification of MAs based on population update mechanisms
Solution Creation Based Algorithms (SCs) In SCs, A set of parent solutions are merged to generate the new solution, in other words no single solution is used to create the fresh solution. Furthermore, the SCs can be categorized into two subcategories which are combination-based algorithms and stigmergy-based algorithms. In combination-based algorithms several solutions are combined or crossover-ed. Genetic Algorithm (GA), Gene Expression (GE), Harmony Search (HS), Bee Colony Optimization (BCO), Cuckoo Search (CS), Dolphin Search (DS) are some examples of this subcategory. On the other hand, in strategy-based solutions different solutions are indirectly coordinated by intermediate structure to generate new solutions. Ant Colony Optimization (ACO), Termite Hill Algorithm (THA), River Formation Dynamics (RFD), Intelligence Water Drops Algorithm (IWDA), Water-Flow Optimization Algorithm (WFOA), and Virtual Bees Algorithm (VBA) are some examples of the second subcategory.
Differential Vector Movement Based Algorithms (DVMs) Applying the mutation or shifting operation on the algorithm in order to generate a new solution is called Differential Vector Movement method. The fresh generated solution needs to be fitted to the previous one to participate in the next iteration of the optimization procedure. In this context, DVMs is categorized into three subcategories. In the first subcategory, the whole population's solution is used to generate the new solution, such operation occurs in Firefly Algorithm (FA) Gravitational Search Algorithm (GSA), Central Force Optimization (CFO), Human Group Formation (HGF) and Charged System Search (CSS). In the second sub-category, a small number of solutions (neighbourhoods) in population is employed to generate a new solution such as Artificial chemical process (ACP), Thermal Exchange Optimization (PSO), Group Search Optimizer (ALO), and Group Search Optimizer (GWO). In the last sub-category, only the relevant (best/worst) solutions are employed to generate the new solution such as Differential Evolution (DE), Artificial Bee Colony (ABC), Particle Swarm Optimization (PSO), Ant Lion Optimizer (ALO), and Grey Wolf Optimizer (GWO).
2.4 Taxonomy According to Number of Parameters
To deeply consider the internal configuration of the algorithm for this type of classification. Tuning the parameter of the algorithm plays a vital role in the performance of the algorithm when solving a specific problem. As mentioned in [ 1 ], it is a complicated task to choose the best values of the parameter that scores a better solution. Furthermore, the parameters can enhance the robustness and flexibility of the MAs if they are adjusted correctly. The optimization problem plays a vital role in defining the values of parameters. From a complexity perspective, the complexity of an algorithm is affected by the number of parameters. In this context and taking into account the importance of the parameters, this classification is introduced. Kanchan Rajwar et al. in [ 68 ] first classify the MAs according to the number of primary parameters employed in the MAs as illustrated in Fig. 6 .

The classification of MAs according to the number of primary parameters
The number of parameters changes from one algorithm to another, which can be 0, 1, 3, 4, etc. For simplicity we will consider four main groups holding algorithm parameter numbers up to 3 and the rest fall into the miscellaneous group. The following paragraphs provide a detailed explanation of the five groups in this classification.
Zero‑parameter-based algorithms (ZPAs): The ZPAs do not have any parameter in their internal configuration so it also called Free‑parameter-based algorithms. The absence of parameters in ZPAs gives the user the opportunity to easily adapt the algorithm to be utilized in different optimization problems. Hence, the algorithms belong to this group considered as flexible, adaptive, and easy-to-use algorithms. Teaching–Learning-Based Optimization (TLBO) [ 22 ], Black Hole Algorithm (BH) [ 69 ], Multi-Particle Collision Algorithm (M-PCA) [ 70 ], Symbiosis Organisms Search (SOS) [ 71 ], Vortex Search Optimization (VS) [ 72 ], Forensic-Based Investigation (FBI) [ 73 ], and Lightning Attachment Procedure Optimization (LAPO) [ 74 ] are some examples of ZPAs.
Single‑parameter-based algorithms (SPAs): SPAs is the type of algorithms that own a single primary parameters in their internal configuration. So, it also is called monoparameter-based algorithms. Mostly, this single parameter has the ability to change the amount of exploration and exploitation that occurred in the algorithm. For example, in the Artificial Bee Colony (ABC) algorithm the single parameter Limit is used to determine the amount of food source left [ 75 ], in the Salp Swarm Algorithm (SSA) c1 is the parameter used to achieve a better balance between explorative and exploitative capabilities [ 76 ], and in Harris Hawks Optimizer (HHO) [ 77 ] the switch between soft and hard besiege is achieved by the magnitude value parameter E . Cuckoo Search (CS), Killer Whale Algorithm (KWO), and Social Group Optimization (SGO) are another example of this group.
Two‑parameter-based algorithms (TPAs): In TPAs only two primary parameters exist in the internal structure of the algorithm. For example, in the Grey Wolf Optimizer (GWO), the two primary parameters a and c must be adjusted. The a is adjusted to be equal to 2 to 0 , allowing the algorithm to perform a smooth transition from exploration and exploitation while the c parameter is used to allow the algorithm to reach distinct locations around the optimal agent relative to the current location, In the Marine Predators Algorithm (MPA), P and FADs are the two primary control parameters. To overstate the predator or prey move, P is adjusted, while FADs is used to manage exploration behavior. Finally, in the Whale Optimization Algorithm (WOA) the two primary parameters A and C need to be modified to perform the exploration-to-exploitation transition and to allow the algorithm to explore several positions around the optimal agent relative to the present location. Differential Evolution (DE), Simulated Annealing (SA), Grasshopper Optimization Algorithm (GOA), Political Optimizer (PO), and Artificial Chemical Reaction Optimization Algorithm (ACROA) are just a few instances of TPAs.
Three‑parameter-based algorithms (TrPAs): In TPAs only three primary parameters exist in the internal structure of the algorithm. For example, the mutation rate mr , the crossover rate cr , and the new population selection criterion are the three parameters used in the Genetic Algorithm (GA) to allow the algorithm to escape from the local optima, improve the accuracy of the solution, and generate a most fit new generation, respectively. The randomization, attractiveness, and absorption are the three parameters included in the Firefly Algorithm (FA) to manage the execution of the algorithm and the random walks of fireflies. Finally, the distance bandwidth (BW), the harmony memory considering rate (HMCR), and the pitch adjusting rate (PAR) are the three primary parameters used in Harmony Search (HS) to increase the opportunity of achieving a global search and improve the local search problem. Squirrel Search Algorithm (SSA), Krill Herd (KH), Spring Search Algorithm (SSA), Artificial Algae Algorithm (AAA), Gases Brownian Motion Optimization (GBMO), Hurricane-Based Optimization Algorithm (HOA), Orca Optimization Algorithm (OOA), Social Spider Algorithm (SSA), Water Cycle Algorithm (WCA), Equilibrium Optimizer (EO), Parasitism Predation Algorithm (PPA), and Heap-Based Optimizer (HBO) are few instances of this group.
Miscellaneous: The rest of algorithms that own over three parameters in their internal configuration fall under the category of the miscellaneous group. It is not easy to cover all three-parameter algorithms. so, only three subgroups are introduced. the first subgroup is the four parameter-based algorithms such as Ant Colony Optimization (ACO), Sine Cosine Algorithm (SSA), Archimedes Optimization Algorithm (AOA), and Gravitational Search Algorithm (GSA). The second subgroup holds algorithms that employed five primary parameters in their internal structure such as Particle Swarm Optimization (PSO), Cheetah Chase Algorithm (CCA) and Farmland Fertility Algorithm (FFA). The last subgroup is algorithms with more than five primary parameters in their internal configuration. Biogeography-Based Optimization (BBO) with six parameters, Henry Gas Solubility Optimization (HGSO) with twelve primary parameters and the Camel Algorithm (CA) with seven } primary parameters are the most familiar algorithms in this subgroup. Cheetah Chase Algorithm (CCA), Exchange Market Algorithm (EMA), and Forest Optimization Algorithm (FOA) are also instances of this subgroup.
In general algorithms with few parameter-based MAs are easy to be adapted and hence the applicability of these algorithms to handle any optimization problem will increase and, on the other hand, large parameter-based MAs cause a disability of these algorithms to handle the optimization problems, as we encounter a problem in adapting all of their parameters to be suited for problem being tackled. hence the applicability will be decreed.
2.5 Metaheuristic Algorithms Merits
The MAs have a priority to be studied by the researcher than HAs, as they have four characteristics [ 78 ], which can be summarized as follows.
Metaheuristics simplicity It is painless to inspire a MAs as we can use a natural concept, physical phenomena or an animal behavior in the inspiration process. Utilizing the merit of simplicity, the researchers Seize the opportunity to make an extension in the metaheuristics works as they develop a new method by mimicking a natural idea, use the ability of search enhancement techniques to boost the performance of an existing algorithm, or even take the advantages in two metaheuristics algorithms and generate a new metaheuristics algorithm by applying a hybridization process. Furthermore, simplicity encourages computer scientists and other researchers to easily study the existing MAs and then apply them to solve a wide range of problems.
Metaheuristics flexibility In the other techniques there is a need to modify the structure of the algorithm to be matched with the problem being solved, unlike these techniques metaheuristics flexibility virtue allows the researchers to easily apply the MAs on any problem as the MAs have the capability of treating the problem as black box, in other words it need the input(s), output(s) of a problem on hand. No effort is used in modifying the structure; all effort is directed towards formulating the problem being solved in the form of an optimization problem.
Metaheuristics stochastic nature Computing the derivation of the search space of the problem is a necessity for the gradient-based optimization techniques to achieve an optimal solution. Dissimilar to these techniques, the preponderance of MAs is considered as a derivative-free mechanism when applying the process of optimization, specifically the MAs follow a stochastic nature during the search process as they start the optimization process by employing a set of search agents to generate random solutions without computing the derivative of the search space. The collaborative work of these search agents allows the algorithm to get the optimal solution. This merit allows researchers to easily use the MAs algorithms to perfectly tackle compound, expensive, and difficult problems that suffer from the trouble of obtaining the derivative information.
According to the previous features, the research community has increased, and researchers from different fields and application areas have been using the metaheuristic optimization algorithm in their work. About 4,476 documents founded in the Scopus have used the word metaheuristics in the last decade. Figure 7 a is introduced to visualize the distribution of research studies according to the subject area, while Fig. 7 b is used to depict the number of studies generated in each year of the previous decade.

Scopus statistics from 2014 to 2023
3 Development Process of Metaheuristic Optimization Algorithms
The simplicity merit of MAs allows researchers to easily develop a large number of algorithms in different application areas. To develop a new metaheuristic algorithm, a researcher can follow one of the following development processes according to the type of algorithm that is being developed, and some processes can also be used together.
Develop a new optimization algorithm The most of work for developing an optimization algorithm done by inspire the main idea of the algorithm from a different metaphors or concepts. These metaphors or concepts are mainly a simulation of rules or processes in different disciplines such as Chemistry, Physics, Biology, Psychology, Computation, Maths, and Human. Figure 3 is used to visualize a different source of inspiration with examples in each category. In general, most metaheuristics have been designed to mimic the system of living and survival of beings such as animals, birds, and insects, in addition to mimicking natural evolution. Insects (specifically, bees and ants) are the most popular metaphor for the development of a new optimization method by researchers.
Develop a new optimization algorithm from existing one One of the most popular ways to develop a new optimization method is to benefit from the operators of a specific algorithm in enhancing the structure of another algorithm. In simple words, the operators of other algorithms can emerge into the basic structures of the algorithm to boost the performance of the previously developed algorithm, and hence use it in solving different types of problems and issues. There are many enhancement operators used in the field; one of the most used ones is opposition-based learning (OBL). OBL is a machine learning mechanism that is used to increase the performance of the optimization algorithm by considering the opposite position of the solution in the search space. Specifically, two values are computed, the main and opposite positions, according to the objective function value, one of the two values maintained in the optimization process, and the other discarded. Taking into account only the best values, the optimization process became more accurate and a high level of performance is achieved. The orthogonal learning (OL) strategy is another example of an operator used as an enhancement strategy for MAs. The OL strategy mainly improves the exploitation capabilities. For example, the OL strategy was used to improve the Archimedes optimization algorithm, the cuckoo search algorithm and the artificial bee colony optimization algorithm, respectively. Enhanced solution quality (ESQ) is another mechanism used in the MA enhancement process. The ESQ was used to improve the performance of the reptile search algorithm and the Harris Hawks optimization (HHO) algorithm, respectively. Finally, the Local Escaping Operator (LEO) is used to develop an optimized version of the MPA called the enhanced marine predator algorithm (EMPA).
Hybridizing two or more optimization algorithm As a trial for enhancing the performance and applicability of the optimization method, researchers can benefit from hybridizing two or more optimization algorithms together in order to take the main strengths of each algorithm. The idea behind hybridization is to choose one algorithm better in exploration capabilities and another better in exploitation capabilities. Many challenges are encountered when we develop a new algorithm using the hybridization process, such as how to select the algorithm and how to merge them together, and is the new algorithm better than each one separately?
As shown in the previous paragraphs, there is a different development process for developing a new optimization method, although there is a set of limitations that must be considered during the development process such as the difficulty of transforming all the concepts with details into a mathematical form, how the algorithm totally manages the change in information about the source of inspiration, in addition to how people with low familiarity with the inspiration sources develop new methods.
3.1 Criteria for Comparative Algorithms
To gauge the effectiveness of newly developed algorithms, it is crucial for research to present the process of comparing them with existing algorithms. This should include a discussion of the selection criteria for comparative algorithms and the methodology used for comparison. The selection criteria for comparative algorithms depend mainly on the nature of the algorithm and the development process followed in developing the algorithm. In all cases, comparative algorithms should contain common criteria, which are state-of-the-art algorithms, newly developed algorithms, CEC winner algorithms, and high-performance algorithms. Specifically in case of developing the algorithm using the inspiration of a phenomenon process, the comparative algorithms list must contain algorithms with the same inspiration source or concept if there exist in addition to the common criteria algorithms. In case of developing an algorithm using the restructure method (i.e., merging a new operator or strategy), the comparative algorithms must contain the basic algorithm, algorithms developed using the same strategy if exists, algorithms that contain the strategy itself, in addition to the common criteria algorithms. In the case of developing algorithms using the hybridization process, the comparative algorithm list must contain the two basic algorithms that participate in the hybridization process, in addition to the common criteria algorithms.
3.2 Novelty Claims of Metaphor-Based Methods
The different ways of developing an optimization algorithm and the simplicity merit of the metaheuristic allow researchers to easily develop a large number of MAs. But a question must be asked here: Does this inspiration convey a novelty? In this section, we will present a set of claims and myths in the inspiration process of the metaheuristic optimization algorithms. As introduced in [ 79 ] a six widely used algorithms have been analyzed to prove that all components of the six (grey wolf, moth-flame, whale, firefly, bat and ant lion) are equivalent to a component of well-known techniques such as evolutionary algorithms and particle swarm optimization. Hence the authors called these algorithms misleading or tricky optimization algorithms, as they were inspired by bestial or duplicated metaphors and did not bring any novelty or useful principles in the metaheuristics field. We will present what considerations must be taken when developing a new novel algorithm and how to judge about the novelty of the new proposed algorithm in the field of metaheuristics.
Recently, a large number of publications have developed self-proclaimed or novel metaphor-based methods, but it is not obvious why they used them and what the novelty ideas are behind these methods. The set of all negative points, criticizes about novelty claims of various metaphor-based methods, can be introduced in the following points:
The metaphor-based methods redefine a well-known concept in the field of optimization and deliver it as a new concept or under new terminologies.
weak translation of the metaphors into a mathematical model or equations, and the model cannot be used totally to reflect the metaphors correctly. Finally, the proposed algorithm does not translate the mathematical model obtained from the metaphor correctly.
There is a myth in introducing the motivations behind the use of metaphor where instead of delivering the motivations as a sound or scientific basis they use accurate motivations such as a new metaphor "has never been used before" or a new mathematical model "has never been appeared in the past". Additionally, there is no concentration on the optimization process itself and how this process is employed to introduce effective design choices.
Instead of applying the evaluations of the proposed algorithms mainly on the state-of-the-art problems, the authors of these methods depend on the comparison with other algorithms or experimental analysis of low complexity problems in evaluating the performance or applicability of the proposed algorithm.
To prevent these negative points, the authors must apply two metrics analyses of the proposed algorithm before naming it as a "novel", which are:
Usefulness: in which the author must clearly introduce what are the useful ideas that come from the metaphor and how this metaphor helps in solving the optimization problems.
Novelty: When proposing a new method in the field of metaheuristics, was this new metaphor novel used to convey ideas?
4 Optimization Problems Overview
Achieving an acceptable solution is the main goal of any algorithm. Due to the rapid expansion of the complexity of the problem, scientists need to develop new methods that can cover this rapid extension. In this context, scientists are working to formulate any problem as an optimization problem to be easily tackled by optimization algorithms, as they provide better solutions than other traditional methods. In different fields, a great number of problems are formulated as an optimization problem, such as genetic algorithms used to automatically find and classify solitary lung nodules \cite{de2014automatic}, perform a classification for web pages, mining the web content, and dynamic organizing of the web content by ant colony optimization [ 80 ], In [ 81 ] Hussein et al., use the HHO to discover and design the drug through chemical descriptor selection and chemical compound activities. Applying HHO in microchannel heat sinks to minimize entropy generation [ 82 ], COVID-19 prediction [ 83 ], finally applying image segmentation and thresholding in [ 84 , 85 ].
4.1 Basic Structure of Optimization Problems
In this section, we will try to support the readers who may not be familiar with optimization methods with the basic definitions and terms related to the optimization field. The process of solving an optimization problem using a metaheuristic algorithm starts with identifying the real-world problem, after that we move to the problem description stage in which we define the characteristics of the problem, determining the functional requirement in addition to analysis of nonfunctional requirements. After completing the problem description stage, we move to the research stage, in which the researcher first concentrates on how to mathematically formulate the problem in a mathematical form. To formulate the problem, we need to determine the design variables and parameters, formulating the objective function, determining the basic constraints on the variables, analyzing the complexity of the problem, and finally justifying the use of a metaheuristic algorithm. In the following paragraphs, the three main components which exist in any optimization problem are the objective function, the decision variables, and a set of constraints on these variables are discussed in detail.
Optimization model: Every system can be considered as a set of inputs producing one or more input, The system uses the set of constraints to minimize the number of inputs, in other words, we consider only the inputs that obey the constraint (i.e., valid inputs) and discard the other which does not match with the constraints (i.e., invalid inputs). The system performs processing on the valid inputs to produce the optimal solution, which can be evaluated using the objective function to obtain the minimum or maximum output value. In fact, the optimization algorithm will not find the optimal values of constraints; instead, it uses the constraints to produce the optimal solutions and construct the feasible solution area. The feasible solution area can be considered as the area which contains an infinite number of feasible solutions and one or more can be classified as the optimal one.
Formulating the optimization model as an optimization problem: When we solve the problem using the optimization algorithm, we look for all possible combinations of inputs. For example, if we have 3 inputs each with 10 discrete values, then we get 1000 combinations of inputs. The initial test to solve and evaluate the input is to use brute-force techniques. The brute force techniques will do better to obtain the optimal solution, but what about the large sized problems. Certainly, we will find a big problem in handling these problems using the brute-force techniques; hence searching all possible combinations for most real-world problems is impossible.
To avoid confusion for non-familiar people with the area of optimization, in this study, we will introduce the basic and most frequent terminologies used in the field:
The search space: it is the area in which all possible combinations of inputs are located.
The search landscape: it is the set of all possible combinations of inputs with their corresponding objective values.
Decision variables: it is the unknown quantities that need to be determined by assigning values to them. It is also known as the design variables. All possible values that can be assigned to these variables are named variable scope or domain. It can be mathematically as X i where i = 1,2,3…N.
The objective function: This is the equation of the decision variables. In which all the decision variables exist with different parameters. It is used to judge the quality of the solution obtained for the problem being handled. In other words, after calculating the values of the decision variables, we substitute them in the objective function to obtain the objective value. The minimum objective value is the optimal solution for minimization problems, and the maximum is the optimal solution for the maximization problem.
Mathematically the single objective optimization problem can be formulated as Eq. ( 1 ) while the Multi objective optimization problem can be formulated as Eq. ( 2 ).
The optimization problems can be categorized in different ways. Categorizing optimization problems is an important step in choosing the algorithm that provides the optimal solution. It is not easy to introduce a rigorous or comprehensive taxonomy for optimization problems. This is due to the multiplicity of the classification term. But due to the important role of this taxonomy, in this paper we present a simplified and summarized version of the available taxonomies, illustrated in Fig. 8 . In the following subsections, the different subcategories of the optimization problem are discussed in detail.

Optimization problem taxonomy
4.2 Taxonomy According to the Objective Function
In terms of the number of objectives, there are two types. If the number of objectives is greater than one, the problem is called a multi-objective optimization problem; otherwise, the problem is named a single-objective optimization problem. Usually, real-world optimization problems are multi-objective. For example, if we need to design a table, we will consider two objectives, for example, minimizing the weight and the price of the table.
Single-objective optimization Only one global optimal solution exists in single-objective optimization. The objective function only considers one objective; therefore, the best optimal solution can be easily determined by comparing the obtained solutions using basic comparison operators < , > , ≤ , ≥ , and = , the nature of this type allows the algorithm to easily tackle optimization problems. Without loss of generality, Eq. ( 1 ) is used to determine the mathematical structure of a single-objective optimization problem.
where the problem decision variable is symbolized by n , m and P exist to represent the number of inequality and equality constraints, respectively. For the i th variable, ub i and lb i are used to represent the upper and lower boundaries, respectively.
Multi-objective optimization In contrast to single objective optimization, A set (more than one) of objectives need to be optimized simultaneously in the multi-objective optimization problems. Usually, these objectives are a conflict with each other, so most of work in this type is paid to achieving a trade-off between these objectives. The set of solutions in this type is called a Pareto optimal solution. The Pareto optimal dominance is employed to compare the solutions obtained in order to determine the optimal solutions. Extra storage is needed to hold the Pareto optimal solutions. Without loss of generality, Eq. ( 2 ) is used to determine the mathematical structure of a single objective optimization problem.
where the problem decision variable is symbolized by n , m and P exist to represent the number of inequality and equality constraints respectively. For the variable i th , U i and L i are used to represent the upper and lower limits, respectively. The number of objectives is denoted by o , and the g i and h i are the i th inequality and equality constraints, respectively. In general, the clash among objectives enforces the problem designer to consider more than one criterion in the comparison of obtained solutions and therefore the classical comparison operator does not perform better, instead, the Pareto dominance Eq. ( 3 ) is used to define the best optimal solutions.
Here the two solutions are represented by the vectors x and y . The x is said to dominate y denoted as (x ≤ y) if x has at least one better value in all objectives.
4.3 Taxonomy According to Function Form
From another angle, classification can be done according to function form. If we have a real-world optimization problem, the constraints are linear qualities and inequalities and the objective function formed as linear then the problem is said to be a linear optimization problem. In nonlinear optimization, one or both of the objective functions and constraints are nonlinear, and this is the realistic and complex one [ 86 ].
4.4 Taxonomy According to the Design Variable
According to the nature of the design variables, we can present three different types of optimization problems, as detailed in the following points.
Discrete optimization problems In discrete optimization problems the values of the design variables are discrete and in which there is a finite set of values. The shortest path problem and the minimum spanning tree problem are two instances of this type. For more details, we can mention that the discrete optimization consists of integer programming and combinatorial optimization. Integer programming deals with the formulation and solution of discrete integers (or binary integers) valued in the design variables. On the other hand, combinatorial optimization emphasizes the combinatorial origin, formulation, or solution of a problem. Mainly it seeks to achieve pairs (i.e., Assignments, groupings, orderings) of discrete and finite values under the influence of specific constraints. These pairs involve a component of solutions of potential combinatorial problem solutions [ 87 ]. In Bioinformatics, Artificial intelligence and other fields combinatorial optimization can be applied such as identifying propositional formula models or defining the 3D structure of protein, finding the shortest path in graphs, the travelling salesman problem, the knapsack problem in addition to the pin packing problem, the quadratic assignment problem which has been tackled in this study.
Continuous optimization problems In continuous optimization problems, A range of values is assigned to the design variables, so every design variable has an infinite set of values. These problems have two types constrained continuous optimization problems which there is a constant on the variables. For unconstrained continuous optimization problems there is an absence of these constraints maximization the general yield for differential amplifiers, optimization of the mechanical system of shock absorption are two examples of this type [ 88 ].
Mixed discrete–Continuous optimization problems In many problems a design variable has a mixture of discrete and continuous values, in this case we call the problem mixed discrete–continuous type. This type is the most widely used one, where numerous real-world problems are complex and possess a mixed quantitative and qualitative input. In [ 89 ], a set of instances is addressed using black-box optimization techniques.
4.5 Taxonomy According to Constraints
Furthermore, the classification can be according to the restrictions on the design variables.
Unconstrained Optimization Problem If there are no constraints on the design variables we call this type as unconstrained optimization problem, the unconstrained optimization can be viewed as iterative methods stating with initial estimation for the optimal solution then a set of iteration is used to reach for the optimal solution. Usually, the solutions were reduced iteratively to an optimal solution. In [ 90 ], Fletcher and Roger mentioned that the unconstrained optimization methods differ according to how much information the user provides, such as the gradient method, the second derivative method, and the non-derivative method.
Constrained optimization problem If there is one or more constraints, the optimization problem falls under the constrained optimization problem class. Furthermore, there are two subclasses of this type. The first subclass is equality constraint problem in which the values of the design variables are restricted to be equal to the specific value. The second subclass is inequality-constrained problem the design variables are restricted to greater / smaller than a specific value. From a formulation perspective, every equality constraint can be mathematically transformed to two inequality constraints. For example, ϕ(x) = 0 is equivalent to ϕ(x) < 0 and ϕ(x) > 0 [ 86 ]. Mainly, the constrained optimization covers three types of optimizations which are network optimization, bound constraints optimization, and the global optimization. Global optimization includes one of the most widely used problems, which is engineering design optimization problems.
5 Performance Assessment of Optimization Algorithms
First of all, we must refer to an important term, the efficiency of the algorithm, which means how the algorithm responds against finding the optimal solutions for the problem to be solved. Achieving an optimal solution is not the only purpose of a good optimization algorithm; instead, the algorithm must be high quality and achieve a better situation in the applicability process on different classes of problems. To judge the quality and applicability of the algorithm, the algorithm must be compared against a set of qualitative and quantitative measures. The good quality algorithm performs better and achieves better results when tested against qualitative and quantitative measures. In this section, we will present the whole assessment environment used to test the quality and applicability of the algorithm.
CEC Test suite CEC stands for Congress on evolutionary computation. Mainly the CEC holds a different class of problems, which may be uni-model, multi-modal, fixed-dimension multi-modal, and composite. CEC is usually used to test the performance of the algorithm and its ability to solve different classes of problems. In the art of optimization almost all studies perform the CEC function as a fitness function to test algorithm's performance itself and to compare the algorithm's performance against other algorithms.
Statistical Measures In this metric, the Best, Worst, Mean, and standard deviation are computed to the obtained solutions to judge about the quality of all solutions obtained together. The best solution is the one with a minimum value of fitness function in minimization optimization and the opposite is right for maximization optimization. The Worst is the solution which has a maximum value of fitness function on the minimization optimization and the opposite is right for maximization optimization. while the mean is used to compute the average value of all obtained solutions (obtained from executing the algorithm many times), and the small value of the mean means that the algorithm is doing better. Finally, the standard deviation or STD is the statistical measure that gives the reader insight into the differences among the obtained solutions, and the algorithm with small STD value is also better than the other with large value. There is also an important statistical measure, which is capable of measuring the whole performance of algorithms for any number of functions. This measure uses the mean rank sum value to rank the algorithms. Ranking these values in ascending order enables us to say that the algorithm with the lowest value is the best among all algorithms participating in comparison for all functions together.
Convergence curve Drawing a relation between the solutions scored by the algorithm and the number of iterations or number of function evaluations is the primary goal of the convergence curve. To summarize the behavior of the algorithm, the convergence curve is drawn to judge the speed of the algorithm in reaching the global optimal solution. For the minimization problem and to compare the performance of many algorithms. The lower convergence curve is better than the upper one. Also, we can compute how fast the algorithm converges towards the optimal solution through the rate of convergence measure.
Diversity Diversity measure is one of the measures related to the algorithm’s convergence behavior. In simple words, diversity means how the search agents of the algorithm are distributed in the search space. A high diversity value of the algorithm can be translated into a great exploration ability of the algorithm, and a low value can be translated into a great exploitation ability of the algorithm. Hence the diversity values of the algorithm must be smoothly transited from high value in the first iterations of the algorithm to low value in the rest of iterations of the algorithm. In this context, we can say that the good diversity of the algorithm leads to avoiding premature convergence and achieve a good speed in achieving the optimal solution hence score a high level of efficiency.
Trajectory diagram In order to test the behavior of a specific agent of the algorithm over the curse of iterations the trajectory diagram is used. The fluctuations of the curve are an indication of the better performance of that agent and its ability to explore and exploit the search space better.
Search history diagram To visualize the history of positions scored by the search agent during the process of optimization, the search history curve is drawn.
Exploration and exploitation The exploration and exploitation (EXPL-EXPT) curves are used to visualize the exploitative and explorative capabilities of the algorithm. Usually, the overlaps between the two curves exist to tell us about the shifting between exploration and exploitation, and therefore an EXPL-EXPT balance.
Real-world problems To test the ability of the algorithm in solving different classes of problem the real-world problem is tackled. Engineering design problems are the most widely used problems as many algorithms use the (pressure vessel, welded beam, 15/3/25/52-bar truss system, tension/compression spring…etc.) classical design problems to quiz the algorithm performance.
Operation platforms Alongside the previous measures, the algorithm quality can be affected by the environment setup in which the algorithm is executed. The good environment in both software and hardware capabilities leads to good behavior of the algorithm. In this context, we must mention that when we compare more than one algorithm to judge which is better, we must execute the algorithms in the same environment to achieve a fair comparison.
6 Metaheuristics Applications
As mentioned above, MAs have a great degree of applicability, as they operate better in solving different problems that involve a computation time restriction, a high-dimensional problem, and other kinds of problems. Specifically, MAs are capable of dealing with different classes of optimization problems in different fields. In the following subsections, the applicability of MAs in some of these fields are illustrated in detail.
6.1 IEEE Congress on Evolutionary Computation (IEEE CEC)
CEC stands for Congress on evolutionary computation. Mainly the CEC holds a different class of problems, which may be uni-model, multi-modal, fixed-dimension multimodal, and composite. CEC is usually used to test the performance of the algorithm and is considered as an indication of the capabilities of the algorithm to solve different classes of problems. In the art of optimization, almost all studies perform the CEC function as fitness functions to test the algorithm's performance itself and to compare the algorithm's performance against other algorithms. Almost a different version of the CEC test suite is introduced every year. Tables 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9 , 10 , 11 , and 12 are presented below to provide the reader with the basic information on each version of the CEC benchmark function and how metaheuristic algorithms are applied to solve these benchmark functions.
6.2 Engineering Design Problems
It is easy to provide an optimal design for a simple problem that contains a small number of design variables with a small range of values. In contrast to complex problems with many components, algorithms consume a huge amount of time to develop an optimal design. For example, the mechanical problem with different components and multiple objectives and constraints. Another example for complex problems is the engineering design problems in which the design process starts with exploiting the experience of designers to guess an optimal design for any problem, but this is not the optimal direction. In order to treat this poor thinking, we need systematic work that guarantees achieving an optimal design that is better than any other human design. Automatic techniques or, in other words, metaheuristics algorithms (MAs) are used to effectively diversify the search space with large parameters, minimizing the cost, and improving the product life cycle. Mainly, the MAs tune the parameters of the problem to produce the best optimal values of the design variables, hence achieving the optimal design. Table 13 is used to highlight the work of single-objective metaheuristics optimization algorithms in solving engineering design problems; also, Table 14 is introduced to clarify the tries of multi-objective optimization algorithms in tackling engineering design problems.
6.3 NP‑Hard Problems
In NP‑hard problems the NP stands for nondeterministic polynomial time where the nondeterministic refers to nondeterministic Turing machines which apply the idea of brute-force search method. On the other hand, the polynomial is used to refer to the amount of time required to apply the quick search to get the single solution of the deterministic algorithm, or the time consumed by the nondeterministic Turing machines to perform extensive search. P is the set of all decision problems solvable in polynomial time. Specifically, the decision problem has two answers YES and No. Consequently, if all YES answers are checked in polynomial time, then the problem belongs to set of NP problems; on the other hand, co-NP is used for NO answer. If the polynomial-time solution obtained for a specific problem leads to a polynomial-time solution for all problems in the NP in this case the problem is said to be NP-hard. Also, a problem is NP-Complete iff it is NP-Hard, and it is in NP itself. Due to the high computational complexity, the exhaustive search methods do not have the ability of getting the best solution.
Quadratic Assignment Problem (QAP) As mentioned in [ 195 ] the QAP is NP-hard, as the polynomial time is not sufficient to obtain the approximate solution from optimal solution. QAP was first introduced by Koopmans and Beckmann in 1957 [ 196 ] as an extension of the linear assignment problem. QAP is considered a combinatorial optimization problem that has been considered and tackled by many research studies in the last three decades. However, the good results obtained in these studies but until now the QAP is not well solved as there is no exact algorithm capable of solving problems with more than 20 input sizes in a reasonable amount of computational time [ 197 ]. In QAP we seek to locate the facilities in its appropriate location under the condition that it is an exact-one-to-exact-one problem, that is, each site can only grasp only one facility and each facility must be placed in only one site where the distances between facilities and sites are determined. The main optimization goal of QAP is to minimize the distance and flow between each pair of facilities delegated to their relevant sites. Recently, QAP is addressed by many books, studies and reviews, as listed in Table 15 . From another angle, there are several problems that are considered as special types of QAP (Table 16 ).
The Bin Packing Problem (BPP) The Bin Packing Problem (BPP) is one of most familiar combinatorial problems that is considered as strongly NP-hard problem [ 218 ]. In BPP we need to pack a set of items m into n bins with the aim of minimizing the number of bins required to hold all items. The BPP can be mathematically formulated as in Eq. 4 [ 219 ].
where capacity of the bin y j is symbolized by C yj .
The BPP benchmark data sets consist of three different types that are commonly classified as Easy, Medium, and Hard class as mentioned in [ 220 ]. Also, the BPP appears in one, two, three, and multi-dimensional form (Table 17 ).
Travelling Salesman Problem (TSP) One of the most familiar combinatorial optimization NP-Hard is the TSP in which we need to minimize the route as possible consumed to visit all cites precisely once and return to the initial city given a list of cities and distances among them. For example, in the TSP of 20 city, we have a huge number of feasible solutions (approx.1.22 × 1017). Guess how much time is required to perform this task using exhaustive search? the answer is very long. Therefore, exhaustive searches have disabilities in tackling such problems. The use of MAs destroys this disability, as it was used to find near optimal solutions in a reasonable amount of time [ 233 ]. Vehicle routing problems (VRPs) is the general form of TSP and is a multi-objective real-world problem tackled by many MAs such as genetic algorithm (GA), particle swarm optimization (PSO) and colony optimization (ACO) as in [ 234 ].
Job Shop Scheduling (JSS) JSS is a NP-Hard problem in which the algorithm seeks to consume a polynomial time to solve it. In JSS we need to process a finite set of jobs using a limited set of machines. JSS is a general type of scheduling problem. JSS is addressed by many MAs in [ 235 , 236 , 237 ], and [ 238 ].
6.4 Medical Science
Most of medical activities (i.e., Diagnosing, imaging, treatment, and monitoring) depends in its work on the computer or electronic device that is operate using an algorithm-based software [ 68 ]. Several researchers have used GAs for edge detection of images acquired using different imaging modalities, including magnetic resonance imaging, CT, and ultrasound [ 239 ]. In [ 240 ], Pereira et al., applied a set of computational tools for mammogram segmentation to improve the detection of breast cancer using GA combined with wavelet analysis to allow the detection and segmentation of suspicious areas with 95% sensitivity. GA has been applied for feature selection to identify a region of interest in mammograms as normal or containing a mass [ 241 ]. Also GA is combined with a support vector machine to differentiate benign and malignant breast tumours in ultrasound images [ 242 ], GA is combined with diversity index to discover lung nodules by developing an automatic threshold clustering method [ 80 ]. In [ 243 ] electroencephalography signals were used to detect hypoglycemia in patients with type 1 diabetes. Depending on neural networks in conjunction with ant colony optimization (ACO) and particle swarm optimization (PSO) Suganthi and Madheswaran use a more advanced computer-aided decision support system and mammogram to group tumours and detect breast cancer stages as described in [ 244 ]. Based on artificial bee colony (ABC) algorithm Kockanat and et al., Develop a technique for demonising images using 2D impulse response digital filter as illustrated in [ 245 ].
6.5 Robotics
Robotics is a vital active research field that owns some challenges that needs to be optimized such as task performance, Decrease the robotics cost, achieve a better reliability, in addition to minimize the unit complexity over other traditional robot systems. In this context, metaheuristics can be used to tune machine learning methods to enhance the collaborative behavior of robotics. One of the most active problems in robotics is the redundant humanoid manipulator issue. The complexity of this problem comes from the existence of multiple number of degrees of freedom and complex joint structure. This problem causes difficulty in achieving an inverse kinematics solution. Scientists make an effort to formulate this problem as a minimization problem, hence the MAs can perform better in solving this problem. In [ 246 ], the multilayer perceptron neural network is trained by the exploitative and explorative capabilities of the bee’s algorithm to learn the inverse kinematics of a robot manipulator arm. To conquer the problem of multi-solution, the GA is used to achieve a global optimal solution for inverse kinematics of 7-DOF (seven degree of freedom) manipulator [ 247 ]. Also, the inverse kinematics of the seven-degree-of-freedom (7-DOF) manipulator is perfectly tackled by the particle swarm optimization algorithm (PSO) by exploiting the strong intelligent scene and collaborative behavior among particles [ 248 ]. Biogeography-based optimization (BBO) is hybrid with differential evolution (DE) and uses the merits of the hybrid migration operator and the adapted Gaussian mutation operator to solve the inverse kinematics problem of the 8-DOF redundant humanoid manipulator [ 249 ].
6.6 Finance
Metaheuristics algorithms can be one of the most promising techniques used to solve different types of problem that occur in the finance and banking activities. In the following points, we will introduce a list of the most familiar problems and how the metaheuristics used to solve these problems.
Portfolio optimization and selection problem (POSP) in this problem, investors seek to assign optimal weights to the assets of the portfolio to achieve a minimal risk of investment. In [ 250 ], the authors provide a survey to solve POSP using metaheuristics and examples. Furthermore, the three GA, TS, and SA metaheuristic algorithms are used to solve POSP. The authors of [ 251 ] use the PSO algorithm to solve the POSP version with a cardinality constraint.
Index tracking problem (ITP) The ITP is a trading strategy that can depend mainly on two processes (hold and buy). In ITP we want to simulate the behavior of the index of the stock market using a minimum number of stocks. In other words, the ITP is developed to passively simulate the performance of the stock market index. For the specific German index, the authors of [ 252 ] use the SA to minimize tracking errors. The combinatorial search is hybrid with the DE for solving the ITP. The authors of [ 253 ] compare the performance of GA with quadratic programming and propose a solution approach to minimize the returns on the index using data from the FTSE100 index. Finally, in [ 254 ] the authors conducted a set of experiments to solve a special type of ITP and noticed that there was an improvement in an index.
Options pricing problem (OPP) Speculative activities are one of the most familiar tasks in financial markets, and the option can be one of the tools for speculative activities. Due to the fast dynamic motion of the financial market, it is difficult to guess the price of the option using traditional methods, so metaheuristic algorithms can be a promising choice in that case. In order to find parameters that achieve consistency between the model and market prices, Gilli and Schumann [ 255 ] use the PSO and DE to study the pricing of the calibration option. Finally, the authors of [ 256 ] have shown that the pricing of option operations can be enhanced compared to the traditional binomial lattice method when we use the ACO algorithm.
6.7 Telecommunications Networks
The recently needs for developing complex and large computer systems lead to an urgent demand for designing and developing high quality and more extensive network design and routing techniques and optimally solving problems in such an area. Also, we can notice that most problems in telecommunications are complex and hard to solve using traditional techniques and approximate algorithms, so there is urgent need to employ metaheuristic algorithms to solve network design and routing problems. A set of nodes (i.e., computers, databases, equipment, or radio transmitters) can be connected together using a transmission link (i.e., optical fiber, copper cable, radio, or satellite links) to construct communication networks. Under a set of constraints such as reliability, throughput, delay and link capacity, we seek to achieve a minimum cost of configurations as an objective function for these networks, and many problems can be appeared such as number of nodes, number of routing paths, the frequency assignment, and the capacity installation. A large number of studies using metaheuristics in solving telecommunications problems such as Kim et al. [ 257 ] employ a SA algorithm in the mobile radio system to allocate the nominal cells of channels. To minimize the installation cost and maximize traffic, the authors in [ 258 ] use the tabu search algorithm with randomized greedy procedures to find the location of the base stations of the universal mobile-based communication system. Specifically, good approximate solutions for large and medium-sized instances are obtained by the randomized greedy procedures, and these solutions were improved by using the tabu search algorithm. Finally, a new metaheuristic algorithm developed based on the Genetic Algorithm and Ant System was proposed to achieve better and efficient solutions for real-life transportation network design problems in large real networks located in two different places (Canada, city of Winnipeg) [ 259 ].
6.8 Food Manufacturing Industry
Recently, the metaheuristics can be considered as one of the most widely used efficient decision-making techniques that can be used to solve problems in different disciplines. In this section, we will present brief information about using metaheuristics in one of these disciplines, which is the food manufacturing industry. Specifically, metaheuristics can be applied in many food processes such as thermal drying, fermentation, and distillation. In [ 260 ], the authors develop a new hybrid method based on artificial bee colony (ABC) and the record-to-record travel algorithm (RRT) for Optimizing the Traceability in the Food Industry. The proposed method is employed to solve and provide the optimal minimal solution for the batch dispersion manufacturing problem. The hybrid RRT-ABC is used in the French food industry to carry out real-world experiments (that is, sausage manufacturing) to obtain high-performance results compared to traditional methods. The Artificial Bee Colony Algorithm (ABCA) used in the development of a delivery route optimization method to achieve a fresh food distribution without decreasing the quality of the food [ 261 ]. Finally, in [ 262 ], the Simulated Annealing (SA) is hybrid with the Virus Colony Search Algorithm (VCS) to improve the quality of the result of a sustainable Closed-Loop Supply Chain Network (CLSCN) design in the olive industry.
7 Open Issues and Challenges
However, the good features and abilities of the MAs in solving a wide range of problems, like other techniques, suffers from a set of problems in the following points, we will refer to these problems.
The stochastic nature and near optimal solution As we know, generating an optimal solution is one of the main features of deterministic algorithms such as simplex method. On the contrary to that, the metaheuristics algorithms (as it is a stochastic algorithm in nature) does not guarantee optimality of the obtained solution, but it provides an acceptable solution. This is one of the significant disadvantages of MAs. It is worth mentioning that the deterministic methods (unlike the stochastic methods) face difficulty when dealing with high-complex problems (that is, high-dimensionality and non-differentiable problems). Practically, when we decide to use one of the previous two methods, we choose to gain something and give the other.
The scale-ability and expensive computational cost Practically, the MAs score great promising results in solving problems in different natures such as discrete, continuous and combinatorial problems that contain a large number of decision variables. However, when solving large-scale global optimization problems (LSGOP) the MAs consume an expensive amount of computational cost. This scalability, challenge is one of the most important challenges that researchers must consider in the future due to the great growth in the size of the optimization problems when dealing with high-dimensional machine learning and large-scale engineering problems. In this context, many strategies are developed by the researchers to cover this problem such as the parallelization, approximation and surrogate modelling, hybridization of local search and memetic algorithms, decomposing the big problems into sub-problems, and befit from the sampling techniques.
The weakness of theoretical and mathematical analysis In most sciences such as chemistry, Biology, physics and others, the mathematical analysis of a method can be computed accurately to specify how much the method costs in terms of computational cost. Unlike those sciences, in metaheuristics we encounter a challenge in computing the exact computational cost of the algorithm, the reason behind this difficulty is from mathematical perspective it is difficult to analyze why the metaheuristics algorithms are so successful. Also, researchers need to pay attention to solving problems in determining the convergence analysis of many metaheuristics’ optimization algorithms. Finally, researchers also need to develop innovative methods that allow researchers to easily analyze and compute the algorithm's cost in the case of modification and scaling up the algorithm.
Intensification and diversification trade-off The algorithm's degree of effectiveness is measured by the ability of the algorithm to transit smoothly between the exploration (that is, explore as much as possible the feasible area) and the exploitation (that is, achieving good steps towards the optimal solution's area) stages. Achieving a high degree of intensification and diversification balance is one of the most important challenges or issues in most MAs. However, some algorithms achieve an acceptable degree of trade-off between exploration and exploitation; the vast majority of MAs need to address this challenge by scoring a high level of global diversification and local intensification [ 263 ].
Large-scale real-world problem formulation Nowadays the vast majority of problems in recent fields such as data science and big data analysis tasks are considered as large-scale real-world problem (LSRP) that is due to the large number of problem components and problem dimensions. Formulating a large-scale real-world problem (LSRP) is one of the crucial issues in metaheuristic algorithms. The issue comes from the large number of optimization variables (decision variables) included in the problem, how these variables interact with each other, how much the variables or components are related to each other, and what is the effect of one variable on the other variables. Also, it is worth mentioning that the large number of variables is translated as the problem size, which affects the computational cost of the algorithm that deals with this problem.
The limitations of the No-Free-Lunch theorem One of the most fundamental theories in the field of optimization is the No-Free-Lunch theorem [ 264 ] which states that there is no universal optimizer for all kinds of problems that is the algorithm may do better in some kinds of problems and do no better for the other kinds. We cannot generalize this theory, as it has been proved for the type of single-objective optimization, but it does not hold yet for problems with continuous and infinite domains in addition to multi-objective optimization [ 265 , 266 ]. In this context, the researchers in the field of metaheuristics must answer how to apply the NFL in terms of several dimensions?
Comparing different algorithms Comparing similar algorithms through the absolute value of the objective function or number of function evaluations is a possible task. On the other hand, we encounter a problem in comparing different algorithms with different objectives through a formal theoretical analysis. Practically no fair/honest or rigorous comparisons exist in this field [ 267 ].
Parameter tuning and control The algorithm's parameter plays the most vital role in determining the performance of any optimization algorithms. The algorithm's designer can change the performance of the algorithms by applying the parameter tuning process of the algorithm. Specifically, we can say that poor tuning leads to poor performance, and the opposite is true. As mentioned in [ 268 ], it is practically not an easy task to tune the algorithm parameter and control it by changing its values. Another point we must refer to is that, for well-tuned parameters, there are no clear reasons for unchanging the values of these parameters during the optimization process. Until now, the process of parameter tuning has been implemented by applying parametric tests, while parameter control can be implemented stochastically in which the values of the parameters are picked randomly within a prespecified range. Therefore, there is an urgent need to develop automatic systematic methods to control and tune the parameters. The authors in [ 269 ] and [ 270 ] proposed a self-tuning method as a trial to encounter problems of parameter tuning and control, but with this trial, the computational cost is still expensive. Based on the previous notes, there is an urgent need to develop an automatic method that applies an adaptive change of the parameters in addition to less effect on the computational cost of the algorithm.
The lack of big data applicability Dealing with big data and developing a big data algorithm has turned into an urgent demand today as the data volume has increased dramatically with the help of automatic data collection methods. In this context, we noticed that there is no more concentration on the application of metaheuristics on big data in the current literature. There are no more studies on how to benefit from applying metaheuristics along with big data algorithms. Consequently, in this review, we inform the researchers to spend more effort and trials in developing new reliable methodologies and algorithms to solve big data problems with the help of metaheuristics.
The lack of machine learning and metaheuristics combination One of the most powerful and influential methods for making a decision and performing a predictions task is the machine learning (ML). Recently, very helpful results have been achieved by the ML techniques. So, researchers in the metaheuristics field must pay an attention to methods that benefit from the ML techniques in optimizing the work of current MAs algorithms or developing a new ML-based metaheuristics algorithms. The following points may be helpful and promising with regard to this point.
Using the new advances in reinforcement, ensemble, and deep learning in applying an automatic choice of specific problems to be handled by existing and new optimization algorithms [ 271 ].
Benefit from the capabilities of machine learning techniques in optimizing the work of the optimization field by generating an automatic model for representing the optimization problems, adjusting the analysis techniques for analyzing the search space, in addition to beating large and complex problems by decomposing them into smaller size problems [ 272 ]. In another prospective, we can use the ML capabilities in applying automatic configurations of the algorithms by allowing the ML algorithms to choose the appropriate values for the algorithm's operators, especially for metaheuristic algorithms due to a large number of parameters [ 273 ].
Shortened the gap between the metaheuristic’s algorithms and the problem domain knowledge Treating the problem as a black box is a double-edged weapon. However, this can be considered as a strength of the metaheuristic’s algorithms over other algorithms, but it also a challenge. Considering and integrating the domain knowledge of the problem with the designed algorithm will dramatically increase its performance. For example, a problem-orientated research direction can be obtained by designing the algorithm's operator and search mechanisms based on the characteristics of the problem which also can be benefit in reducing the complexity of the algorithm by considering the optimality conditions of the problem being considered [ 273 ].
In summary, the following observations from the experiment are:
Apply the MAs on parallel computing and combine the metaheuristic techniques with the modern parallel computing technologies to generate a powerful method matched with the future generation of computing.
Exploit the benefits of artificial intelligence and machine learning techniques to provide new algorithms that have the ability to automatically adjust the parameters and automatically analyze the algorithms.
Developing new methods directed towards strengthens the ability of MAs in addressing the large-scale global optimization (LSGO) problems.
A great effort must be paid for the hybridization process to allow the algorithms to use the Powers of many algorithms, also generating intelligent techniques that can provide the researcher with insights about what algorithms best suited to be hybridize together?
7.1 Emerging Technologies
After discussing the open issues and challenges, we see that there is much future work in the field of metaheuristics, a set of guidelines must be declared to help the future researcher in the field to address these challenges. In this section, the guidelines used to dive deeper into potential future research directions are introduced. Specifically, we will concentrate on two emerging technologies which are machine learning and quantum computing and how these technologies enhance the optimization process.
7.1.1 Quantum-Inspired Metaheuristics
Metaheuristics can be employed to obtain a global optimal solution for a wide range of different problems in different computational aspects. These methods can benefit from the concept of quantum computing (QC) to enhance the solutions obtained. Hybridizing the quantum computing with the metaheuristics will produce a quantum-inspired metaheuristic algorithm (QIMAs). QIMAs can be considered as an alternative approach to classical optimization methods for solving the optimization algorithm [ 274 ]. The main idea behind the QIMAs is to better use the quantum computing principles with the metaheuristics in order to boost the performance of the classical optimization algorithms by scoring a higher-performing results than traditional metaheuristic algorithms. Specifically, the use of QC in metaheuristics will accelerate convergence, enhance exploration, enhance exploitation, and provide a good balance between the two capabilities of the algorithm. The most promising merit that affects the performance of the algorithm is the parallel processing feature in QC [ 275 ]. Finally, QIMAs can be used in different disciplines such as engineering and science.
7.1.2 Intelligent Optimization
In this section we will introduce a new type of optimization that is considered as one of the most promising topics in the future of the metaheuristic field. Intelligent optimization (IO) is developed as a test to intelligently adjust the set of inputs and their values to achieve an optimal output(s). In other words, IO cost minimal consumption in determining and choosing the optimal solution among all possible solutions of the problem. The importance of using the IO is dramatically increased when solving complex and NP-hard problems in which the selection of the optimal solution through an exhaustive search is considered impossible or practically difficult. In addition, IO can be used as an important solution for the time-consuming problem of many optimization algorithms. IO can be used in all steps of the optimization process, such as defining the problem, handling, and formulating the objective function(s) and constraints.
7.1.3 Hybrid Metaheuristics and Mathematical Programming
In the last years, hybrid optimization algorithms have achieved promising results compared to classical optimization algorithms. The main aim behind the hybrid metaheuristics is to provide a reliable and high-performance solutions for the large and complex problems. One of the most widely used combinations is hybrid metaheuristics with mathematical programming approaches. This combination will increase the quality of the solution, as it benefits from the two methods in determining an exact solution in a reasonable amount of time. The following points define the mathematical programming approaches that can be used with metaheuristics to increase the quality of the solutions obtained [ 276 ].
Enumerative algorithms: in this approach we can use one of the well-known tree search methods such as dynamic programming and branch and bound. These methods follow the divide-and-conquer strategy where the search space can be divided into smaller search spaces, and then in each sub area we apply the optimization separately. By applying this strategy, the quality of the solution will increase, and the time consumed will decrease.
Decomposition and Relaxation methods: in this approach we can decompose the large problem using the Bender’s decomposition method or apply the Lagrangian relaxation method to convert the problem into smaller problems.
Pricing and Cutting plane algorithms: in this approach, we prune using polyhedral combinatorics.
8 Conclusion
In this review, a comprehensive study of metaheuristic algorithms is introduced that involves defining the concept of optimization. Studying the appearance of metaheuristic term. Introducing an explanation of the features of the MAs more than other techniques; Different taxonomies of the MAs according to different aspects such as inspiration source, number of search agents, population updating mechanisms, and number of parameters. Studying the metrics used in the Performance Evaluation of the algorithm. A great effort is paid to clarify the optimization problem in detail, concentrating on different classification techniques, and, moreover, the study reviews the use of metaheuristics in different application areas such as engineering design problems, NP hard problems, medical science, and robotics. Finally, we introduce some of the issues that exist in the MAs literature and the future directions of this important field.
Data Availability
Data sharing is not applicable to this article as no data sets were generated or analyzed during the current study.
Talbi EG (2009) Metaheuristics: from design to implementation. Wiley, Berlin
Book Google Scholar
Schneider J, Kirkpatrick S (2007) Stochastic optimization. Springer, Berlin
Google Scholar
Sörensen K, Sevaux M, Glover F (2018) A history of metaheuristics. In: Handbook of Heuristics. Springer, Berlin, pp 791–808
Glover F, Laguna M, Marti R (2003) Scatter search and path relinking: advances and applications. Handbook of metaheuristics. Springer, Berlin, pp 1–35
Chapter Google Scholar
Fister Jr I, Yang X-S, Fister I, Brest J, Fister D (2013) A brief review of nature-inspired algorithms for optimization. arXiv:1307.4186
Siddique N, Adeli H (2015) Nature inspired computing: an overview and some future directions. Cogn Comput 7:706–714
Article Google Scholar
Molina D, Poyatos J, Del Ser J, García S, Hussain A, Herrera F (2020) Comprehensive taxonomies of nature-and bio-inspired optimization: inspiration versus algorithmic behavior, critical analysis recommendations. Cogn Comput 12:897–939
Baykasoğlu A, Ozsoydan FB (2017) Evolutionary and population-based methods versus constructive search strategies in dynamic combinatorial optimization. Inf Sci 420:159–183
Kennedy J, Eberhart R (1995) Particle swarm optimization. In: Proceedings of ICNN'95-international conference on neural networks, vol 4, IEEE. pp 1942–1948
Mucherino A, Seref O (2007) Monkey search: a novel metaheuristic search for global optimization. In: AIP conference proceedings. American Institute of Physics. pp 162–173
Mirjalili S, Mirjalili SM, Lewis A (2014) Grey wolf optimizer. Adv Eng Softw 69:46–61
Dorigo M, Birattari M, Stutzle T (2006) Ant colony optimization. IEEE Comput Intell Mag 1(4):28–39
Gandomi AH, Yang X-S, Alavi AH (2013) Cuckoo search algorithm: a metaheuristic approach to solve structural optimization problems. Eng Comput 29:17–35
Mirjalili S (2015) The ant lion optimizer. Adv Eng Softw 83:80–98
Hashim FA, Houssein EH, Hussain K, Mabrouk MS, Al-Atabany W (2022) Honey badger algorithm: new metaheuristic algorithm for solving optimization problems. Math Comput Simul 192:84–110
Article MathSciNet Google Scholar
Holland JH (1992) Genetic algorithms. Sci Am 267(1):66–73
Price KV (2013) Differential evolution. Handbook of optimization: from classical to modern approach. Springer, Berlin, pp 187–214
Sette S, Boullart L (2001) Genetic programming: principles and applications. Eng Appl Artif Intell 14(6):727–736
Khalid AM, Hamza HM, Mirjalili S, Hosny KM (2023) MOCOVIDOA: a novel multi-objective coronavirus disease optimization algorithm for solving multi-objective optimization problems. Neural Comput Appl 1–29
Houssein EH, Oliva D, Samee NA, Mahmoud NF, Emam MM (2023) Liver cancer algorithm: a novel bio-inspired optimizer. Comput Biol Med 165:107389
Fard AF, Hajiaghaei-Keshteli M (2016) Red deer algorithm (RDA); a new optimization algorithm inspired by red deers’ mating. Int Conf Ind Eng 12:331–342
Rao RV, Rao V (2016) Teaching-learning-based optimization algorithm. Springer, Berlin
Laguna M (2018) Tabu search. Handbook of heuristics. Springer, Berlin, pp 741–758
Daskin A, Kais S (2011) Group leaders optimization algorithm. Mol Phys 109(5):761–772
Emami H (2022) Stock exchange trading optimization algorithm: a human-inspired method for global optimization. J Supercomput 78(2):2125–2174
Xu Y, Cui Z, Zeng J (2010) Social emotional optimization algorithm for nonlinear constrained optimization problems. In: Swarm, evolutionary, and memetic computing: first international conference on swarm, evolutionary, and memetic computing, SEMCCO 2010, Chennai, India, December 16–18, 2010. Proceedings 1, Springer, New York. pp 583–590
Rashedi E, Nezamabadi-Pour H, Saryazdi S (2009) GSA: A gravitational search algorithm. Inf Sci 179(13):2232–2248
Erol OK, Eksin I (2006) A new optimization method: big bang–big crunch. Adv Eng Softw 37(2):106–111
Patel VK, Savsani VJ (2015) Heat transfer search (HTS): a novel optimization algorithm. Inf Sci 324:217–246
Hashim FA, Houssein EH, Mabrouk MS, Al-Atabany W, Mirjalili S (2019) Henry gas solubility optimization: a novel physics-based algorithm. Futur Gener Comput Syst 101:646–667
Hashim FA, Hussain K, Houssein EH, Mabrouk MS, Al-Atabany W (2021) Archimedes optimization algorithm: a new metaheuristic algorithm for solving optimization problems. Appl Intell 51:1531–1551
Abdel-Basset M, Mohamed R, Sallam KM, Chakrabortty RK (2022) Light spectrum optimizer: a novel physics-inspired metaheuristic optimization algorithm. Mathematics 10(19):3466
Siddique N, Adeli H (2017) Nature-inspired chemical reaction optimisation algorithms. Cogn Comput 9:411–422
Abdechiri M, Meybodi MR, Bahrami H (2013) Gases Brownian motion optimization: an algorithm for optimization (GBMO). Appl Soft Comput 13(5):2932–2946
Irizarry R (2004) LARES: An artificial chemical process approach for optimization. Evol Comput 12(4):435–459
Javidy B, Hatamlou A, Mirjalili S (2015) Ions motion algorithm for solving optimization problems. Appl Soft Comput 32:72–79
Kaveh A, Dadras A (2017) A novel meta-heuristic optimization algorithm: thermal exchange optimization. Adv Eng Softw 110:69–84
Huang D, Yang J, Xiang D, Xu G (2022) Gaussian swarm optimization: a math-inspired metaheuristic algorithm for solving optimization problems. SSRN 4313360
Mirjalili S (2016) SCA: a sine cosine algorithm for solving optimization problems. Knowl-Based Syst 96:120–133
Houssein EH, Saad MR, Hashim FA, Shaban H, Hassaballah M (2020) Lévy flight distribution: a new metaheuristic algorithm for solving engineering optimization problems. Eng Appl Artif Intell 94:103731
Abdel-Basset M, El-Shahat D, Jameel M, Abouhawwash M (2023) Exponential distribution optimizer (EDO): a novel math-inspired algorithm for global optimization and engineering problems. Artif Intell Rev 1–72
Tanyildizi E, Demir G (2017) Golden sine algorithm: a novel math-inspired algorithm. Adv Electr Comput Eng 17(2)
Yang X-S (2012) Flower pollination algorithm for global optimization. In: International conference on unconventional computing and natural computation. Springer, Berlin. pp 240–249
Xing B, Gao W-J, Xing B, Gao W-J (2014) Invasive weed optimization algorithm. In: Innovative computational intelligence: a rough guide to 134 clever algorithms. pp 177–181
Premaratne U, Samarabandu J, Sidhu T (2009) A new biologically inspired optimization algorithm. In: 2009 International conference on industrial and information systems (ICIIS). IEEE. pp 279–284
Zhao Z, Cui Z, Zeng J, Yue X (2011) Artificial plant optimization algorithm for constrained optimization problems. In: 2011 Second international conference on innovations in bio-inspired computing and applications. IEEE. pp 120–123
Cai W, Yang W, Chen X (2008) A global optimization algorithm based on plant growth theory: plant growth optimization. In: 2008 International conference on intelligent computation technology and automation (ICICTA), vol 1. IEEE. pp 1194–1199
Zhang H, Zhu Y, Chen H (2014) Root growth model: a novel approach to numerical function optimization and simulation of plant root system. Soft Comput 18:521–537
Labbi Y, Attous DB, Gabbar HA, Mahdad B, Zidan A (2016) A new rooted tree optimization algorithm for economic dispatch with valve-point effect. Int J Electr Power Energy Syst 79:298–311
Singh PR, Elaziz MA, Xiong S (2019) Ludo game-based metaheuristics for global and engineering optimization. Appl Soft Comput 84:105723
Mahmoodabadi MJ, Rasekh M, Zohari T (2018) TGA: team game algorithm. Future Comput Inform J 3(2):191–199
Fadakar E, Ebrahimi M (2016) A new metaheuristic football game inspired algorithm. In: 2016 1st Conference on swarm intelligence and evolutionary computation (CSIEC), IEEE. pp 6–11
Razmjooy N, Khalilpour M, Ramezani M (2016) A new meta-heuristic optimization algorithm inspired by FIFA world cup competitions: theory and its application in PID designing for AVR system. J Control Autom Electr Syst 27:419–440
Moosavian N, Roodsari BK (2014) Soccer league competition algorithm: a novel meta-heuristic algorithm for optimal design of water distribution networks. Swarm Evol Comput 17:14–24
Kashan AH (2014) League championship algorithm (LCA): an algorithm for global optimization inspired by sport championships. Appl Soft Comput 16:171–200
Gao-Wei Y, Zhanju H (2012) A novel atmosphere clouds model optimization algorithm. In: 2012 International conference on computing, measurement, control and sensor network, IEEE. pp 217–220
Ghorbani N, Babaei E (2014) Exchange market algorithm. Appl Soft Comput 19:177–187
Ahrari A, Atai AA (2010) Grenade explosion method—a novel tool for optimization of multimodal functions. Appl Soft Comput 10(4):1132–1140
Savsani P, Savsani V (2016) Passing vehicle search (PVS): a novel metaheuristic algorithm. Appl Math Model 40(5–6):3951–3978
Yao P, Gupta SM (2022) Small world optimization algorithm for solving multi-objective u-shaped sequence-dependent disassembly line balancing problem. Small 7(05):15–28
Tang H-K, Cai Q, Goh SK (2022) Meta-heuristic optimizer inspired by the philosophy of Yi Jing. Philosophy. https://doi.org/10.21203/rs.3.rs-1259241/v1
Askari Q, Younas I, Saeed M (2020) Political optimizer: a novel socio-inspired meta-heuristic for global optimization. Knowl-Based Syst 195:105709
Dueck G (1993) New optimization heuristics: The great deluge algorithm and the record-to-record travel. J Comput Phys 104(1):86–92
Kirkpatrick S, Gelatt CD Jr, Vecchi MP (1983) Optimization by simulated annealing. Science 220(4598):671–680
Chinnasamy S, Ramachandran M, Amudha M, Ramu K (2022) A review on hill climbing optimization methodology. Recent Trends Manag Commer. https://doi.org/10.46632/rmc/3/1/1
Lourenço HR, Martin OC, Stützle T (2003) Iterated local search. Handbook of metaheuristics. Springer, Berlin, pp 320–353
Resende MGC, Ribeiro C (1998) Greedy randomized adaptive search procedures (GRASP). AT&T Labs Res Tech Rep 98(1):1–11
Rajwar K, Deep K, Das S (2023) An exhaustive review of the metaheuristic algorithms for search and optimization: taxonomy, applications, and open challenges. Artif Intell Rev 56:1–71
Hatamlou A (2013) Black hole: a new heuristic optimization approach for data clustering. Inf Sci 222:175–184
da Luz EFP, Becceneri JC, de Campos Velho HF (2008) A new multi-particle collision algorithm for optimization in a high performance environment. J Comput Interdiscip Sci 1(1):3–10
Cheng M-Y, Prayogo D (2014) Symbiotic organisms search: a new metaheuristic optimization algorithm. Comput Struct 139:98–112
Doğan B, Ölmez T (2015) A new metaheuristic for numerical function optimization: vortex search algorithm. Inf Sci 293:125–145
Shaheen AM, Ginidi AR, El-Sehiemy RA, Ghoneim SSM (2020) A forensic-based investigation algorithm for parameter extraction of solar cell models. IEEE Access 9:1–20
Nematollahi AF, Rahiminejad A, Vahidi B (2017) A novel physical based meta-heuristic optimization method known as lightning attachment procedure optimization. Appl Soft Comput 59:596–621
Karaboga D, Basturk B (2007) Artificial bee colony (ABC) optimization algorithm for solving constrained optimization problems. International fuzzy systems association world congress. Springer, New York, pp 789–798
Mirjalili S, Gandomi AH, Mirjalili SZ, Saremi S, Faris H, Mirjalili SM (2017) Salp swarm algorithm: a bio-inspired optimizer for engineering design problems. Adv Eng Softw 114:163–191
Heidari AA, Mirjalili S, Faris H, Aljarah I, Mafarja M, Chen H (2019) Harris Hawks optimization: algorithm and applications. Futur Gener Comput Syst 97:849–872
Mirjalili S, Lewis A (2016) The whale optimization algorithm. Adv Eng Softw 95:51–67
Camacho-Villalón CL, Dorigo M, Stützle T (2023) Exposing the grey wolf, moth-flame, whale, firefly, bat, and antlion algorithms: six misleading optimization techniques inspired by bestial metaphors. Int Trans Oper Res 30(6):2945–2971
de Carvalho Filho AO, de Sampaio WB, Silva AC, de Paiva AC, Nunes RA, Gattass M (2014) Automatic detection of solitary lung nodules using quality threshold clustering, genetic algorithm and diversity index. Artif Intell Med 60(3):165–177
Wang L, Shen J, Yong J (2012) A survey on bio-inspired algorithms for web service composition. In: Proceedings of the 2012 IEEE 16th international conference on computer supported cooperative work in design (CSCWD), IEEE. pp 569–574
Houssein EH, Hosney ME, Oliva D, Mohamed WM, Hassaballah M (2020) A novel hybrid Harris Hawks optimization and support vector machines for drug design and discovery. Comput Chem Eng 133:106656
Abbasi A, Firouzi B, Sendur P (2021) On the application of Harris Hawks optimization (HHO) algorithm to the design of microchannel heat sinks. Eng Comput 37:1409–1428
Houssein EH, Abohashima Z, Elhoseny M, Mohamed WM (2022) Hybrid quantum-classical convolutional neural network model for COVID-19 prediction using chest X-ray images. J Comput Des Eng 9(2):343–363
Houssein EH, Emam MM, Ali AA (2021) Improved manta ray foraging optimization for multi-level thresholding using COVID-19 CT images. Neural Comput Appl 33(24):16899–16919
Probert M (2012) Engineering optimisation: an introduction with metaheuristic applications, by Xin-She Yang: scope: reference. Level: undergraduate, postgraduate, early career researcher, researcher, specialist, scientist, engineers.
Hoos HH, Stützle T (2004) Stochastic local search: foundations and applications. Elsevier, New York
Mockus J, Eddy W, Reklaitis G (2013) Bayesian heuristic approach to discrete and global optimization: algorithms, visualization, software, and applications, vol 17. Springer, Berlin
Halstrup M (2016) Black-box optimization of mixed discrete-continuous optimization problems. Black-Box Optim. https://doi.org/10.17877/DE290R-17800
Andrei N (2008) An unconstrained optimization test functions collection. Adv Model Optim 10(1):147–161
MathSciNet Google Scholar
Chen D, Ge Y, Wan Y, Deng Y, Chen Y, Zou F (2022) Poplar optimization algorithm: a new meta-heuristic optimization technique for numerical optimization and image segmentation. Expert Syst Appl 200:117118
Kaveh M, Mesgari MS, Saeidian B (2023) Orchard algorithm (OA): a new meta-heuristic algorithm for solving discrete and continuous optimization problems. Math Comput Simul 208:95–135
Minh H-L, Sang-To T, Wahab MA, Cuong-Le T (2022) A new metaheuristic optimization based on k-means clustering algorithm and its application to structural damage identification. Knowl-Based Syst 251:109189
Srivastava A, Das DK (2022) Criminal search optimization algorithm: a population-based meta-heuristic optimization technique to solve real-world optimization problems. Arab J Sci Eng 47(3):3551–3571
Ghasemi M, Zare M, Zahedi A, Akbari M-A, Mirjalili S, Abualigah L (2023) Geyser inspired algorithm: a new geological-inspired meta-heuristic for real-parameter and constrained engineering optimization. J Bionic Eng 1–35
Akbari MA, Zare M, Azizipanah-Abarghooee R, Mirjalili S, Deriche M (2022) The cheetah optimizer: a nature-inspired metaheuristic algorithm for large-scale optimization problems. Sci Rep 12(1):10953
Feng Z-K, Niu W-J, Liu S (2021) Cooperation search algorithm: a novel metaheuristic evolutionary intelligence algorithm for numerical optimization and engineering optimization problems. Appl Soft Comput 98:106734
Das AK, Nikum AK, Krishnan SV, Pratihar DK (2020) Multi-objective bonobo optimizer (MOBO): an intelligent heuristic for multi-criteria optimization. Knowl Inf Syst 62:4407–4444
Salgotra R, Singh U, Singh S, Mittal N (2021) A hybridized multi-algorithm strategy for engineering optimization problems. Knowl-Based Syst 217:106790
Choo YH, Cai Z, Le V, Johnstone M, Creighton D, Lim CP (2023) Enhancing the Harris’ hawk optimiser for single- and multi-objective optimisation. Soft Comput 27(22):16675–16715
Dubey K, Sharma SC (2021) A novel multi-objective CR-PSO task scheduling algorithm with deadline constraint in cloud computing. Sustain Comput 32:100605
Pereira JLJ, Gomes GF (2023) Multi-objective sunflower optimization: a new hyper-cubic meta-heuristic for constrained engineering problems. Expert Syst e13331
Sopov E (2015) A self-configuring metaheuristic for control of multi-strategy evolutionary search. In: Advances in Swarm and computational intelligence: 6th international conference, ICSI 2015 held in conjunction with the Second BRICS Congress, CCI 2015, Beijing, China, June 25–28, 2015, proceedings, Part III 6. Springer 2015:29–37
Kumawat IR, Nanda SJ, Maddila RK (2017) Multi-objective whale optimization. In: Tencon 2017–2017 IEEE Region 10 Conference, IEEE. pp 2747–2752
Kundu D, Suresh K, Ghosh S, Das S, Panigrahi BK, Das S (2011) Multi-objective optimization with artificial weed colonies. Inf Sci 181(12):2441–2454
Khalilpourazari S, Naderi B, Khalilpourazary S (2020) Multi-objective stochastic fractal search: a powerful algorithm for solving complex multi-objective optimization problems. Soft Comput 24:3037–3066
Saha S, Mukherjee V (2021) A novel multi-objective modified symbiotic organisms search algorithm for optimal allocation of distributed generation in radial distribution system. Neural Comput Appl 33:1751–1771
Abdel-Basset M, Mohamed R, Abouhawwash M (2021) Balanced multi-objective optimization algorithm using improvement based reference points approach. Swarm Evol Comput 60:100791
Jain S, Ramesh D, Bhattacharya D (2021) A multi-objective algorithm for crop pattern optimization in agriculture. Appl Soft Comput 112:107772
Chakraborty S, Sharma S, Saha AK, Chakraborty S (2021) Shade–WOA: a metaheuristic algorithm for global optimization. Appl Soft Comput 113:107866
Zhang Y, Jin Z (2022) Comprehensive learning JAYA algorithm for engineering design optimization problems. J Intell Manuf 1–25
López ED, Puris A, Bello RR (2015) VMODE: a hybrid metaheuristic for the solution of large scale optimization problems. Investig Oper 36(3)
Shabani A, Asgarian B, Gharebaghi SA, Salido MA, Giret A (2019) A new optimization algorithm based on search and rescue operations. Math Probl Eng 2019:1–23
Tuba V, Beko M, Tuba M (2017) Performance of elephant herding optimization algorithm on CEC 2013 real parameter single objective optimization. WSEAS Trans Syst 16:100–105
Aydilek IB, Karaçizmeli IH, Tenekeci ME, Kaya S, Gümüşçü A (2021) Using chaos enhanced hybrid firefly particle swarm optimization algorithm for solving continuous optimization problems. Sādhanā 46(2):65
Umbarkar AJ, Sheth PD, Chinchanikar AM (2022) Solving IEEE CEC-2013 real parameter optimization problems using harmony search algorithm. In: 2022 3rd international conference for emerging technology (INCET). IEEE 2022:1–7
Umbarkar AJ, Moon LR, Sheth PD (2018) Comparative study of CEC’2013 problem using dual population genetic algorithm. Int J Inf Eng Electron Bus 10(5):40–45
Wang X, Chu S-C, Pan J-S (2021) Five phases algorithm for global optimization. In: Advances in intelligent information hiding and multimedia signal processing: proceeding of the IIH-MSP 2021 & FITAT 2021, Kaohsiung, Taiwan, vol 1. Springer 2022:81–97
Fan J, Li Y, Wang T (2021) An improved African vultures optimization algorithm based on tent chaotic mapping and time-varying mechanism. PLoS ONE 16(11):e0260725
Zitouni F, Harous S, Maamri R (2020) The solar system algorithm: a novel metaheuristic method for global optimization. IEEE Access 9:4542–4565
Abdel-Basset M, El-Shahat D, Jameel M, Abouhawwash M (2023) Young’s double-slit experiment optimizer: a novel metaheuristic optimization algorithm for global and constraint optimization problems. Comput Methods Appl Mech Eng 403:115652
Zhang J, Xiao M, Gao L, Pan Q (2018) Queuing search algorithm: a novel metaheuristic algorithm for solving engineering optimization problems. Appl Math Model 63:464–490
Tolabi HB, Ara AL, Hosseini R (2021) An enhanced particle swarm optimization algorithm to solve probabilistic load flow problem in a micro-grid. Appl Intell 51:1645–1668
Abdel-Basset M, Mohamed R, Jameel M, Abouhawwash M (2023) Nutcracker optimizer: a novel nature-inspired metaheuristic algorithm for global optimization and engineering design problems. Knowl-Based Syst 262:110248
Abdel-Basset M, Mohamed R, Azeem SAA, Jameel M, Abouhawwash M (2023) Kepler optimization algorithm: a new metaheuristic algorithm inspired by Kepler’s laws of planetary motion. Knowl-Based Syst 268:110454
Ibrahim Z, Aziz NHA, Aziz NAA, Razali S, Mohamad MS (2016) Simulated Kalman filter: a novel estimation-based metaheuristic optimization algorithm. Adv Sci Lett 22(10):2941–2946
Abedinpourshotorban H, Shamsuddin SM, Beheshti Z, Jawawi DNA (2016) Electromagnetic field optimization: a physics-inspired metaheuristic optimization algorithm. Swarm Evol Comput 26:8–22
Caraveo C, Valdez F, Castillo O (2018) A new optimization metaheuristic based on the self-defense techniques of natural plants applied to the CEC 2015 benchmark functions. In: Advances in fuzzy logic and technology 2017: proceedings of: EUSFLAT-2017—the 10th conference of the European Society for Fuzzy Logic and Technology, September 11–15, 2017, Warsaw, Poland IWIFSGN’2017—the sixteenth international workshop on intuitionistic fuzzy sets and generalized nets, September 13–15, 2017, Warsaw, Poland, vol 1, p 10. Springer
Sattar D, Salim R (2021) A smart metaheuristic algorithm for solving engineering problems. Eng Comput 37(3):2389–2417
Ochoa P, Castillo O, Soria J (2015) Differential evolution algorithm using a dynamic crossover parameter with fuzzy logic applied for the CEC 2015 benchmark functions. In: Fuzzy information processing: 37th conference of the North American Fuzzy Information Processing Society, NAFIPS 2018, Fortaleza, Brazil, July 4–6, 2018, Proceedings 37. Springer 2018:580–591
Thapliyal S, Kumar N (2023) Numeric crunch algorithm: a new metaheuristic algorithm for solving global and engineering optimization problems. Soft Comput 27(22):1–47
Trojovský P, Dehghani M (2023) A new bio-inspired metaheuristic algorithm for solving optimization problems based on walruses behavior. Sci Rep 13(1):8775
Zhang Y, Chi A (2021) Group teaching optimization algorithm with information sharing for numerical optimization and engineering optimization. J Intell Manuf 34(4):1–25
Zhang Y, Chi A, Mirjalili S (2021) Enhanced JAYA algorithm: a simple but efficient optimization method for constrained engineering design problems. Knowl-Based Syst 233:107555
Zhao J, Tang D, Liu Z, Cai Y, Dong S (2020) Spherical search optimizer: a simple yet efficient meta-heuristic approach. Neural Comput Appl 32:9777–9808
Trojovská E, Dehghani M (2022) Clouded leopard optimization: a new nature-inspired optimization algorithm. IEEE Access 10:102876–102906
Faramarzi A, Heidarinejad M, Mirjalili S, Gandomi AH (2020) Marine predators algorithm: A nature-inspired metaheuristic. Expert Syst Appl 152:113377
Dhiman G (2021) ESA: a hybrid bio-inspired metaheuristic optimization approach for engineering problems. Eng Comput 37:323–353
Azizi M (2021) Atomic orbital search: a novel metaheuristic algorithm. Appl Math Model 93:657–683
Talatahari S, Azizi M (2021) Chaos game optimization: a novel metaheuristic algorithm. Artif Intell Rev 54:917–1004
Dehghani M, Montazeri Z, Trojovská E, Trojovský P (2023) Coati optimization algorithm: a new bio-inspired metaheuristic algorithm for solving optimization problems. Knowl-Based Syst 259:110011
Matoušová I, Trojovský P, Dehghani M, Trojovská E, Kostra J (2023) Mother optimization algorithm: a new human-based metaheuristic approach for solving engineering optimization. Sci Rep 13(1):10312
Dehghani M, Trojovská E, Trojovský P, Malik OP (2023) OOBO: a new metaheuristic algorithm for solving optimization problems. Biomimetics 8(6):468
Naruei I, Keynia F (2022) Wild horse optimizer: a new meta-heuristic algorithm for solving engineering optimization problems. Eng Comput 38(suppl. 4):3025–3056
Fritsche G, Pozo A (2019) Cooperative based hyper-heuristic for many-objective optimization. In: Proceedings of the genetic and evolutionary computation conference. pp 550–558
Nadimi-Shahraki MH, Fatahi A, Zamani H, Mirjalili S, Abualigah L (2021) An improved moth-flame optimization algorithm with adaptation mechanism to solve numerical and mechanical engineering problems. Entropy 23(12):1637
Nadimi-Shahraki MH, Taghian S, Mirjalili S, Faris H (2020) MTDE: an effective multi-trial vector-based differential evolution algorithm and its applications for engineering design problems. Appl Soft Comput 97:106761
Nadimi-Shahraki MH (2023) An effective hybridization of quantum-based avian navigation and bonobo optimizers to solve numerical and mechanical engineering problems. J Bionic Eng 20(3):1361–1385
Nadimi-Shahraki MH, Zamani H, Fatahi A, Mirjalili S (2023) MFO-SFR: an enhanced moth-flame optimization algorithm using an effective stagnation finding and replacing strategy. Mathematics 11(4):862
Nadimi-Shahraki M-H, Taghian S, Zamani H, Mirjalili S, Abd Elaziz M (2023) MMKE: multi-trial vector-based monkey king evolution algorithm and its applications for engineering optimization problems. PLOS ONE 18(1):e0280006
Stanovov V, Akhmedova S, Semenkin E (2018) Lshade algorithm with rank-based selective pressure strategy for solving CEC 2017 benchmark problems. In: 2018 IEEE congress on evolutionary computation (CEC). IEEE. pp 1–8
Rueda J, Erlich I (2018) Hybrid population based MVMO for solving CEC 2018 test bed of single-objective problems. In: 2018 IEEE congress on evolutionary computation (CEC). IEEE. pp 1–8
Zhang Y, Wang G-G, Li K, Yeh W-C, Jian M, Dong J (2020) Enhancing MOEA/D with information feedback models for large-scale many-objective optimization. Inf Sci 522:1–16
ALRahhal H, Jamous R (2023) Afox: a new adaptive nature-inspired optimization algorithm. Artif Intell Rev 56:1–44
Demirci H, Yurtay N, Yurtay Y, Zaimoğlu EA (2023) Electrical search algorithm: a new metaheuristic algorithm for clustering problem. Arab J Sci Eng 48(8):10153–10172
Barua S, Merabet A (2023) Lévy arithmetic algorithm: an enhanced metaheuristic algorithm and its application to engineering optimization. Expert Syst Appl 241:122335
Trojovský P, Dehghani M (2022) A new optimization algorithm based on mimicking the voting process for leader selection. PeerJ Comput Sci 8:e976
Majumdar P, Bhattacharya D, Mitra S, Rodrigues LR, Oliva D (2020) An improved binary grey wolf optimizer for constrained engineering design problems. Expert Syst 41:e13458
Guan Z, Cao Z, Wang P et al (2023) Water and salt transport optimization: new metaheuristic algorithm for engineer design. vol 2
Dehghani M, Trojovský P (2022) Serval optimization algorithm: a new bio-inspired approach for solving optimization problems. Biomimetics 7(4):204
Ahmed AM, Rashid TA, Saeed SAM (2021) Dynamic cat swarm optimization algorithm for back-board wiring problem. Neural Comput Appl 33(20):13981–13997
Rezvani K, Gaffari A, Dishabi MRE (2023) The bedbug meta-heuristic algorithm to solve optimization problems. J Bionic Eng 1–21:2465–2485
Azizi M, Talatahari S, Gandomi AH (2023) Fire hawk optimizer: a novel metaheuristic algorithm. Artif Intell Rev 56(1):287–363
Duman S, Kahraman HT, Sonmez Y, Guvenc U, Kati M, Aras S (2022) A powerful meta-heuristic search algorithm for solving global optimization and real-world solar photovoltaic parameter estimation problems. Eng Appl Artif Intell 111:104763
Zitouni F, Harous S, Belkeram A, Hammou LEB (2022) The archerfish hunting optimizer: a novel metaheuristic algorithm for global optimization. Arab J Sci Eng 47(2):2513–2553
Singh N, Houssein EH, Singh SB, Dhiman G (2023) Hssahho: a novel hybrid salp swarm-harris hawks optimization algorithm for complex engineering problems. J Ambient Intell Humaniz Comput 14(9):11569–11605
Azizi M, Aickelin U, Khorshidi HA, Shishehgarkhaneh MB (2023) Energy valley optimizer: a novel metaheuristic algorithm for global and engineering optimization. Sci Rep 13(1):226
Azizi M, Shishehgarkhaneh MB, Basiri M, Moehler RC (2023) Squid game optimizer (SGO): a novel metaheuristic algorithm. Sci Rep 13(1):5373
Wang Y, Wang Z, Wang G-G (2023) Hierarchical learning particle swarm optimization using fuzzy logic. Expert Syst Appl 120759
Han M, Du Z, Yuen K, Zhu H, Li Y, Yuan Q (2023) Walrus optimizer: a novel nature-inspired metaheuristic algorithm. Expert Syst Appl 122413
Zheng R, Jia H, Abualigah L, Wang S, Wu D (2022) An improved remora optimization algorithm with autonomous foraging mechanism for global optimization problems. Math Biosci Eng 19:3994–4037
Shen Q, Zhang D, Xie M, He Q (2023) Multi-strategy enhanced dung beetle optimizer and its application in three-dimensional UAV path planning. Symmetry 15(7):1432
Kadavy T, Pluhacek M, Viktorin A, Senkerik R (2021) Self-organizing migrating algorithm with clustering-aided migration and adaptive perturbation vector control. In: Proceedings of the genetic and evolutionary computation conference companion. pp 1916–1922
Brest J, Maučec MS, Bošković B (2021) Self-adaptive differential evolution algorithm with population size reduction for single objective bound-constrained optimization: Algorithm j21. In: 2021 IEEE congress on evolutionary computation (CEC). IEEE. pp 817–824
Setiawan D, Suyanto S, Erfianto B, Gozali AA (2023) Battlefield optimization algorithm. SSRN 4585054
Zhang H, Zhang Y, Niu Y, He K, Wang Y (2023) T cell immune algorithm: a novel nature-inspired algorithm for engineering applications. IEEE Access. https://doi.org/10.1109/ACCESS.2023.3311271
Salgotra R, Singh S, Singh U, Kundu K, Gandomi AH (2022) An adaptive version of differential evolution for solving CEC2014, CEC 2017 and CEC 2022 test suites. In: 2022 IEEE symposium series on computational intelligence (SSCI). IEEE. pp 1644–1649
Houssein EH, Saeed MK, Al-Sayed MM (2023) Ewso: boosting white shark optimizer for solving engineering design and combinatorial problems. Math Comput Simul. https://doi.org/10.1016/j.matcom.2023.11.019
Chen S, Zheng J (2023) Sand cat arithmetic optimization algorithm for global optimization engineering design problems. J Comput Des Eng 10(6):2122–2146
Ferahtia S, Rezk H, Djerioui A, Houari A, Motahhir S, Zeghlache S (2023) Modified bald eagle search algorithm for lithium-ion battery model parameters extraction. ISA Trans 134:357–379
Ferahtia S, Houari A, Rezk H, Djerioui A, Machmoum M, Motahhir S, Ait-Ahmed M (2023) Red-tailed hawk algorithm for numerical optimization and real-world problems. Sci Rep 13(1):12950
Gupta S, Deep K, Moayedi H, Foong LK, Assad A (2021) Sine cosine grey wolf optimizer to solve engineering design problems. Eng Comput 37:3123–3149
Sulaiman MH, Mustaffa Z, Saari MM, Daniyal H (2020) Barnacles mating optimizer: a new bio-inspired algorithm for solving engineering optimization problems. Eng Appl Artif Intell 87:103330
Kaur S, Awasthi LK, Sangal AL, Dhiman G (2020) Tunicate swarm algorithm: A new bio-inspired based metaheuristic paradigm for global optimization. Eng Appl Artif Intell 90:103541
Lei M, Zhou Y, Luo Q (2019) Enhanced metaheuristic optimization: wind-driven flower pollination algorithm. IEEE Access 7:111439–111465
Li S, Chen H, Wang M, Heidari AA, Mirjalili S (2020) Slime mould algorithm: a new method for stochastic optimization. Futur Gener Comput Syst 111:300–323
Rather SA, Bala PS (2020) Swarm-based chaotic gravitational search algorithm for solving mechanical engineering design problems. World J Eng 17(1):97–114
Wang L, Cao Q, Zhang Z, Mirjalili S, Zhao W (2022) Artificial rabbits optimization: a new bio-inspired meta-heuristic algorithm for solving engineering optimization problems. Eng Appl Artif Intell 114:105082
Abualigah L, Shehab M, Alshinwan M, Mirjalili S, Elaziz MA (2021) Ant lion optimizer: a comprehensive survey of its variants and applications. Archiv Comput Methods Eng 28:1397–1416
Shu L, Jiang P, Zhou Q, Xie T (2019) An online variable-fidelity optimization approach for multi-objective design optimization. Struct Multidiscip Optim 60:1059–1077
Dhiman G, Garg M (2020) Mosse: a novel hybrid multi-objective meta-heuristic algorithm for engineering design problems. Soft Comput 24(24):18379–18398
Tejani GG, Pholdee N, Bureerat S, Prayogo D, Gandomi AH (2019) Structural optimization using multi-objective modified adaptive symbiotic organisms search. Expert Syst Appl 125:425–441
Tawhid MA, Savsani V (2019) Multi-objective sine-cosine algorithm (MO-SCA) for multi-objective engineering design problems. Neural Comput Appl 31:915–929
Jangir P, Buch H, Mirjalili S, Manoharan P (2023) Mompa: multi-objective marine predator algorithm for solving multi-objective optimization problems. Evol Intel 16(1):169–195
Sahni S, Gonzalez T (1976) P-complete approximation problems. J ACM 23(3):555–565
Lawler EL (1975) The quadratic assignment problem: a brief review. In: Combinatorial programming: methods and applications: proceedings of the NATO advanced study institute held at the Palais des Congres, Versailles, France, 2–13 September, pp 351–360
Pitsoulis L (2001) Quadratic assignment problem. Quadratic assignment problem, ch 3. Springer, Boston, pp 2075–2107
Fathollahi-Fard AM, Wong KY, Aljuaid M (2023) An efficient adaptive large neighborhood search algorithm based on heuristics and reformulations for the generalized quadratic assignment problem. Eng Appl Artif Intell 126:106802
Agharghor A, Riffi ME, Chebihi F (2019) Improved hunting search algorithm for the quadratic assignment problem. Indonesian J Electr Eng Comput Sci 14(1):143–154
Shah S (2020) Implementation of iterative local search (ILS) for the quadratic assignment problem. Authorea Preprints
Dokeroglu T (2015) Hybrid teaching–learning-based optimization algorithms for the quadratic assignment problem. Comput Ind Eng 85:86–101
Lv C, Zhao H, Yang X (2011) Particle swarm optimization algorithm for quadratic assignment problem. In: Proceedings of 2011 international conference on computer science and network technology. IEEE. vol 3, pp 1728–1731
Ahuja RK, Orlin JB, Tiwari A (2000) A greedy genetic algorithm for the quadratic assignment problem. Comput Oper Res 27(10):917–934
Dokeroglu T, Sevinc E, Cosar A (2019) Artificial bee colony optimization for the quadratic assignment problem. Appl Soft Comput 76:595–606
Mouhoub M, Wang Z (2008) Improving the ant colony optimization algorithm for the quadratic assignment problem. In: 2008 IEEE congress on evolutionary computation (IEEE World congress on computational intelligence). IEEE. pp 250–257
Tate DM, Smith AE (1995) A genetic approach to the quadratic assignment problem. Comput Oper Res 22(1):73–83
Kılıç H, Yüzgeç U (2019) Tournament selection based antlion optimization algorithm for solving quadratic assignment problem. Eng Sci Technol Int J 22(2):673–691
Lim WL, Wibowo A, Desa MI, Haron H (2016) A biogeography-based optimization algorithm hybridized with tabu search for the quadratic assignment problem. Comput Intell Neurosci 2016:27–27
Duman E, Uysal M, Alkaya AF (2012) Migrating birds optimization: a new metaheuristic approach and its performance on quadratic assignment problem. Inf Sci 217:65–77
Steinberg L (1961) The backboard wiring problem: a placement algorithm. SIAM Rev 3(1):37–50
Lee C-G, Ma Z (2004) The generalized quadratic assignment problem. Research Report, Dept. Mechanical Industrial Eng., Univ. Toronto, Canada, p. M5S
Lawler EL (1963) The quadratic assignment problem. Manage Sci 9(4):586–599
Greenberg H (1969) A quadratic assignment problem without column constraints. Naval Res Logist Q 16(3):417–421
Hahn P, Smith JM, Zhu Y-R (2010) The multi-story space assignment problem. Ann Oper Res 179:77–103
Hahn PM et al (2008) The quadratic three-dimensional assignment problem: exact and approximate solution methods. Eur J Oper Res 184(2):416–428
Knowles J, Corne D (2003) Instance generators and test suites for the multiobjective quadratic assignment problem. International conference on evolutionary multi-criterion optimization. Springer, Berlin, pp 295–310
Punnen AP, Wang Y (2016) The bipartite quadratic assignment problem and extensions. Eur J Oper Res 250(3):715–725
Gary MR, Johnson DS (1979) Computers and intractability: a guide to the theory of NP-completeness. WH Freeman and Company, New York
Zendaoui Z, Layeb A (2016) Adaptive cuckoo search algorithm for the bin packing problem. Modeling and implementation of complex systems. Springer, Berlin, pp 107–120
Scholl A, Klein R (2007) Bin packing. http://www.wiwi.uni-jena.de/Entscheidung/binpp/ . Accessed Oct 2007
El-Ashmawi WH, Elminnaam DSA (2019) A modified squirrel search algorithm based on improved best fit heuristic and operator strategy for bin packing problem. Appl Soft Comput 82:105565
Zhao F et al (2021) A novel cooperative multi-stage hyper-heuristic for combination optimization problems. Complex Syst Model Simul 1(2):91–108
Chen M et al (2019) An efficient deterministic heuristic algorithm for the rectangular packing problem. Comput Ind Eng 137:106097
Li X, Zhao Z, Zhang K (2014) A genetic algorithm for the three-dimensional bin packing problem with heterogeneous bins. In: IIE annual conference. proceedings. Institute of Industrial and Systems Engineers (IISE), p 2039
Adamuthe A, Nitave T (2021) Optimizing large scale bin packing problem with hybrid harmony search algorithm. Int J Ind Eng Comput 12(2):205–220
Blum C, Schmid V (2013) Solving the 2D bin packing problem by means of a hybrid evolutionary algorithm. Procedia Comput Sci 18:899–908
Feng H et al (2020) An enhanced grasshopper optimization algorithm to the bin packing problem. J Control Sci Eng 2020:1–19
Ceselli A, Righini G (2008) An optimization algorithm for the ordered open-end bin-packing problem. Oper Res 56(2):425–436
Tam S-C et al (2010) A new optimization method, the algorithm of changes, for bin packing problem. In: 2010 IEEE fifth international conference on bio-inspired computing: theories and applications (BIC-TA). IEEE, pp 994–999
Kang J, Park S (2003) Algorithms for the variable sized bin packing problem. Eur J Oper Res 147(2):365–372
Abdel-Basset M et al (2018) An improved nature inspired meta-heuristic algorithm for 1-D bin packing problems. Pers Ubiquit Comput 22:1117–1132
Liu DS et al (2008) On solving multiobjective bin packing problems using evolutionary particle swarm optimization. Eur J Oper Res 190(2):357–382
Panwar K, Deep K (2021) Discrete grey wolf optimizer for symmetric travelling salesman problem. Appl Soft Comput 105:107298
Jozefowiez N, Semet F, Talbi E-G (2008) Multi-objective vehicle routing problems. Eur J Oper Res 189(2):293–309
Kahraman C (2006) Metaheuristic techniques for job shop scheduling problem and a fuzzy ant colony optimization algorithm. Fuzzy applications in industrial engineering. Springer, Berlin, pp 401–425
Liu SQ, Ong HL (2004) Metaheuristics for the mixed shop scheduling problem. Asia-Pac J Oper Res 21(1):97–115
Mejtsky GJ (2007) A metaheuristic algorithm for simultaneous simulation optimization and applications to traveling salesman and job shop scheduling with due dates. In: 2007 winter simulation conference. IEEE, pp 1835–1843
Mejtsky GJ (2008) The improved sweep metaheuristic for simulation optimization and application to job shop scheduling. In: 2008 winter simulation conference. IEEE, pp 731–739
Gudmundsson M, El-Kwae EA, Kabuka MR (1998) Edge detection in medical images using a genetic algorithm. IEEE Trans Med Imaging 17(3):469–474
Pereira DC, Ramos RP, Do Nascimento MZ (2014) Segmentation and detection of breast cancer in mammograms combining wavelet analysis and genetic algorithm. Comput Methods Program Biomed 114(1):88–101
Sahiner B et al (1996) Image feature selection by a genetic algorithm: application to classification of mass and normal breast tissue. Med Phys 23(10):1671–1684
Wu W-J, Lin S-W, Moon WK (2012) Combining support vector machine with genetic algorithm to classify ultrasound breast tumor images. Comput Med Imaging Graph 36(8):627–633
Nguyen BL (2014) Non-invasive detection of hypoglycemia in patients with type 1 diabetes using electroencephalography signals. PhD thesis, etection of hypo
Suganthi M, Madheswaran M (2012) An improved medical decision support system to identify the breast cancer using mammogram. J Med Syst 36:79–91
Kockanat S, Karaboga N, Koza T (2012) Image denoising with 2-D FIR filter by using artificial bee colony algorithm. In: 2012 International symposium on innovations in intelligent systems and applications. pp 1–4. IEEE
Pham DT, Castellani M, Fahmy A (2008) Learning the inverse kinematics of a robot manipulator using the bees algorithm.
Yang Y et al (2007) A new solution for inverse kinematics of 7-DOF manipulator based on genetic algorithm. In: 2007 IEEE international conference on automation and logistics. pp. 1947–1951. IEEE
Huang H-C, Chen C-P, Wang P-R (2012) Particle swarm optimization for solving the inverse kinematics of 7-DOF robotic manipulators. In: 2012 IEEE international conference on systems, man, and cybernetics (SMC). pp 3105–3110
Ren Z-W, Wang Z-H, Sun L-N (2015) A hybrid biogeography-based optimization method for the inverse kinematics problem of an 8-DOF redundant humanoid manipulator. Front Inf Technol Electron Eng 16(7):607–616
Doering J, Juan AA, Kizys R, Fito A, Calvet L (2016) Solving realistic portfolio optimization problems via metaheuristics: a survey and an example. In: Modeling and simulation in engineering, economics and management: international conference, MS 2016, Teruel, Spain, July 4–5, pp 22–30. Springer, Berlin
Thomaidis NS, Angelidis T, Vassiliadis V, Dounias G (2009) Active portfolio management with cardinality constraints: an application of particle swarm optimization. N Math Nat Comput 5(03):535–555
Derigs U, Nickel N-H (2003) Meta-heuristic based decision support for portfolio optimization with a case study on tracking error minimization in passive portfolio management. OR Spectrum 25:345–378
Rafaely B, Bennell JA (2006) Optimisation of FTSE 100 tracker funds: a comparison of genetic algorithms and quadratic programming. Manag Financ 32(6):477–492
Oh KJ, Kim TY, Min S (2005) Using genetic algorithm to support portfolio optimization for index fund management. Expert Syst Appl 28(2):371–379
Gilli M, Schumann E (2011) Calibrating option pricing models with heuristics. Natural computing in computational finance, vol 4. Springer, New York, pp 9–37
Kumar S, Thulasiram RK, Thulasiraman P (2008) A bioinspired algorithm to price options. In: Proceedings of the 2008 C3S2E conference, pp 11–22
Kim S-H, Chang K-N, Kim S (2000) A channel allocation for cellular mobile radio systems using simulated annealing. Telecommun Syst 14:95–106
Amaldi E, Capone A, Malucelli F (2003) Planning UMTS base station location: optimization models with power control and algorithms. IEEE Trans Wirel Commun 2(5):939–952
Bagloee SA et al (2013) A hybrid meta-heuristic algorithm for solving real-life transportation network design problems. Int J Logist Syst Manag 16(1):41–66
Dhouib S (2021) Hybrid metaheuristic to optimize traceability in the food industry. Int J Strateg Eng 4(2):14–27
Katiyar S, Khan R, Kumar S (2021) Artificial bee colony algorithm for fresh food distribution without quality loss by delivery route optimization. J Food Qual 2021:1–9
Seydanlou P et al (2022) A multi-objective optimization framework for a sustainable closed-loop supply chain network in the olive industry: hybrid meta-heuristic algorithms. Expert Syst Appl 203:117566
Blum C, Roli A (2003) Metaheuristics in combinatorial optimization: overview and conceptual comparison. ACM Comput Surv 35(3):268–308
Wolpert DH, Macready WG (1997) No free lunch theorems for optimization. IEEE Trans Evol Comput 1(1):67–82
Auger A, Doerr B (2011) Theory of randomized search heuristics: foundations and recent developments. Algorithmica 60(1):1–26
Auger A, Teytaud O (2010) Continuous lunches are free plus the design of optimal optimization algorithms. Algorithmica 57(1):121–146
Yang X-S (2020) Nature-inspired optimization algorithms: challenges and open problems. J Comput Sci 46:101104
Eiben AE, Smit SK (2011) Parameter tuning for configuring and analyzing evolutionary algorithms. Swarm Evol Comput 1(1):19–31
Mohamed AW, Mohamed AK (2019) Adaptive guided differential evolution algorithm with novel mutation for numerical optimization. Int J Mach Learn Cybern 10:253–277
Yang X-S, Karamanoglu M, He X (2014) Flower pollination algorithm: a novel approach for multiobjective optimization. Eng Optim 46(9):1222–1237
Karimi-Mamaghan M et al (2022) Machine learning at the service of metaheuristics for solving combinatorial optimization problems: a state-of-the-art. Eur J Oper Res 296(2):393–422
Ma J et al (2022) A comprehensive comparison among metaheuristics (MHs) for geo-hazard modeling using machine learning: insights from a case study of landslide displacement prediction. Eng Appl Artif Intell 114:105150
Chou J-S, Nguyen T-K (2018) Forward forecast of stock price using sliding-window metaheuristic-optimized machine-learning regression. IEEE Trans Industr Inf 14(7):3132–3142
Karmakar S, Dey A, Saha I (2017) Use of quantum-inspired metaheuristics during last two decades. In: 2017 7th International conference on communication systems and network technologies (CSNT). IEEE. pp 272–278
Gharehchopogh FS (2023) Quantum-inspired metaheuristic algorithms: comprehensive survey and classification. Artif Intell Rev 56(6):5479–5543
Talbi E-G (2016) Combining metaheuristics with mathematical programming, constraint programming and machine learning. Ann Oper Res 240(1):171–215
Download references
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB).
Author information
Authors and affiliations.
Faculty of Computers and Information, Minia University, Minia, Egypt
Essam H. Houssein, Mahmoud Khalaf Saeed & Mustafa M. Al-Sayed
Department of Applied Mathematics, Xi’an University of Technology, Xi’an, 710054, China
School of Computer Science and Engineering, Xi’an University of Technology, Xi’an, 710048, China
You can also search for this author in PubMed Google Scholar
Contributions
Essam H. Houssein: Supervision, Software, Methodology, Conceptualization, Formal analysis, Investigation, Visualization, Writing—review and editing. Mahmoud Khalaf Saeed: Conceptualization, Visualization, Software, Data curation, Resources, Writing—original draft. Gang Hu: Formal analysis, Resources, Validation, Writing—review and editing. Mustafa M. Al-Sayed: Conceptualization, Formal analysis, Visualization, Resources, Validation, Writing—review and editing. All authors read and approved the final paper.
Corresponding author
Correspondence to Essam H. Houssein .
Ethics declarations
Conflict of interest.
The authors declare that there is no conflict of interest.
Ethical Approval
This article does not contain studies with human participants or animals carried out by any of the authors.
Additional information
Publisher's note.
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/ .
Reprints and permissions
About this article
Houssein, E.H., Saeed, M.K., Hu, G. et al. Metaheuristics for Solving Global and Engineering Optimization Problems: Review, Applications, Open Issues and Challenges. Arch Computat Methods Eng (2024). https://doi.org/10.1007/s11831-024-10168-6
Download citation
Received : 19 December 2023
Accepted : 25 March 2024
Published : 21 August 2024
DOI : https://doi.org/10.1007/s11831-024-10168-6
Share this article
Anyone you share the following link with will be able to read this content:
Sorry, a shareable link is not currently available for this article.
Provided by the Springer Nature SharedIt content-sharing initiative
- Find a journal
- Publish with us
- Track your research
Hotel na Vage
Guest Reviews
Guest reviews (1).

- Cleanliness 5
- Amenities 5
Book now and leave a review after your stay to earn up to 120 Trip Coins (approx. US$1.20 ). Trip Coins can be used to save instantly on room rates.

Property Policies
Frequently asked questions, how much does it cost to stay at hotel na vage, what are the check-in and check-out times at hotel na vage, does hotel na vage provide airport transfer services, what amenities and services does hotel na vage have, does hotel na vage have a swimming pool, does hotel na vage have fitness amenities, does hotel na vage provide wi-fi, does hotel na vage have non-smoking rooms, does hotel na vage have a restaurant, is parking available at hotel na vage, recommendations, popular attractions, explore more.
IMAGES
COMMENTS
The engineering design process emphasizes open-ended problem solving and encourages students to learn from failure. This process nurtures students' abilities to create innovative solutions to challenges in any subject! The engineering design process is a series of steps that guides engineering teams as we solve problems.
Criteria are part of identifying and defining a problem, the first stage of the engineering design cycle. develop : In the engineering design cycle, to create different solutions to an engineering problem. engineering: Creating new things for the benefit of humanity and our world. Designing and building products, structures, machines and ...
The engineering design process is a series of steps that engineers follow to come up with a solution to a problem. Many times the solution to a problem involves designing a product (like a machine or computer code) that meets certain criteria and/or accomplishes a certain task. This process is different from the Steps of the Scientific Method ...
The engineering design process is a series of steps that engineers follow to find a solution to a problem. The steps include problem solving processes such as, for example, determining your objectives and constraints, prototyping, testing and evaluation. The process is important to the work conducted by TWI and is something that we can offer ...
Engineering design is the creative process of identifying needs and then devising a solution to fill those needs. This solution may be a product, a technique, a structure, a project, a method, or many other things depending on the problem. The general procedure for completing a good engineering design can be called the Engineering Method of ...
The development step is often divided to include the iterative cycle of build, test, debug, and redesign. The engineering method by nature is an iterative process. 1. Idea. The idea phase usually begins with a problem. The problem statement is typically only vaguely defined and requires research into its viability and its feasibility.
Test solutions. • Using materials and tools given to them by the school's woodshop teacher, the students designed a small box to hold Mrs. Anderson's file folders. They gave it to her to try it out and see what she thought. It is very wide and the sides are short; when Mrs. Anderson puts the files in, they flop over.
Problem identification is the first step of the engineering problem solving method. The relevant themes, processes and techniques for electrical engineering and their application to the senior design project are presented here. Theory and Background. Engineering is a profession of applied science.
It provides an overview of the engineering design process, emphasizing the integration of creativity and functionality in problem-solving. Key skills covered in this course include creative problem-solving techniques specific to design engineering, utilization of computer-aided design (CAD) and simulation tools, project management strategies ...
Applies to Conservation of Mass (COM), the First Law of Thermodynamics (1st Law), and the Second Law of Thermodynamics (2nd Law) Similar to a Free Body Diagram used in Statics and Dynamics. Identify your system or control volume using a dashed line. Identify relevant transfers of mass and energy (as heat and/or work) across the boundary.
Now it's time for the hail mary's, the long shots, the clutching at straws. This method works wonders for many reasons. 1. You really are trying to try "anything" at this point. 2. Most of the time we may think we have problem solving step number 1 covered, but we really don't. 3. Triggering correlations. This is important.
Methodology. Problem solving is a key part of engineering courses, as well as courses in computer science, mathematics, physics, and chemistry. The process for problem solving we will use has 5 steps: State the problem clearly. Describe the input/output information. Work the problem by hand for a simple set of data.
book. The second chapter goes through a typical acquisition life cycle showing how systems engineering supports acquisition decision making. The second part introduces the systems engineering problem-solving process, and discusses in basic terms some traditional techniques used in the process. An overview is given, and then the process of
The second phase of the engineering design cycle is the most important in high school engineering: design exploration. ... Members of the KSTF ETF consider engineering a vehicle to engage students through creative, authentic problem solving. In presenting each phase of the design process separately, our aim was to create an evidence-based ...
recognise and apply a range of problem-solving techniques from each stage of the engineering design cycle, to include the following: physical modelling; mathematical modelling; iteration; use of reference data; refining an engineering specification ... we see that compromise is an abiding characteristic of solving engineering problems. Creative ...
Download scientific diagram | The engineering problem solving cycle (modified from Philips, 2008) from publication: Methods to Study Enhancement of Problem Solving Skills in Engineering Students ...
Students doing engineering design challenges have the opportunity to create and innovate as they work on projects that often have real-world significance or context. As part of the process of designing, testing, and iterating, design challenges enable and encourage students to practice problem solving and troubleshooting, too.
1. Identify the problem. Clearly state the problem. (Short, sweet and to the point. This is the "big picture" problem, not the specific project you have been assigned.) 2. Establish what you want to achieve. Completion of a specific project that will help to solve the overall problem.
Addressing the skilled labor shortage. Encouraging diversity. Keeping up with advancing technology. Overcoming status-quo bias. Here's an overview of how design thinking can help solve these problems. 1. Identifying Obscure Problems. Engineers often encounter problems that are difficult to identify.
🌍 Google map of Vel'sk. Address search, weather forecast, city list of Arkhangelskaya (Russia).
Revolyutsionnaya str. 105, Vel'sk, Arkhangelsk Oblast 165150, Russia Show on Map
The greatest and fastest advances in the computing world today require researchers to develop new problem-solving techniques capable of providing an optimal global solution considering a set of aspects and restrictions. Due to the superiority of the metaheuristic Algorithms (MAs) in solving different classes of problems and providing promising results, MAs need to be studied. Numerous studies ...
Velsk is a town and the administrative center of Velsky District in Arkhangelsk Oblast, Russia, located on the left bank of the Vel River at its confluence with the Vaga River, 545 kilometers south of Arkhangelsk, the administrative center of the oblast. Photo: Ipaat, Public domain. Ukraine is facing shortages in its brave fight to survive.
Explore Hotel na Vage in Vel'sk on Trip.com! Discover great room prices and hot deals. Select your perfect room based on real traveler reviews and ratings for Hotel na Vage.